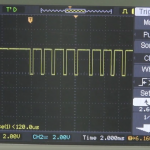
Heute habe ich einen kurzen Test gemacht, der die Latenz meines selbstgebauten DSMX-Moduls ([fancy_link link=“http://copter.cologne/dsmx-modul-fuer-taranis-basteln/“]meine Bauanleitung[/fancy_link]) für die Taranis darstellen sollte. Ich war sehr überrascht, wie gering die Verzögerung ist! Mit bloßen Augen ist kaum wahrzunehmen, dass zwischen dem Umlegen eines Schalters an der Fernsteuerung und der Reaktion des Modells darauf überhaupt Zeit vergeht.
In diesem Video sieht man sehr gut, welch geringe Latenz das selbstgebaute DSMX-Modul für die Taranis zusammen mit den Helis von Spektrum Blade hat. In der echten Welt ist die Verzögerung nicht zu erkennen. Lediglich in der Zeitlupe sieht man, dass es eine winzige Verzögerung zwischen dem Umlegen des Schalters und der Reaktion des Helis darauf gibt.
Weil das Internet voll davon ist und es nach mächtig viel Spaß aussieht, habe ich beschlossen, mir meinen eigenen kleinen Flitzer selbst zu bauen. Allerdings wollte ich für den kleinen 250er racing Quad mit FPVFirst Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... nicht allzuviel Geld ausgeben. Als treuer Zuschauer bot es sich also an, das Projekt von Bruce Simpson alias RCModelReviews nachzubauen. In fünf Videos zeigt er, wie man ohne viel Geld auszugeben einen tollen kleinen Renn-Quad baut.
Ich zeige Euch hier, wie ich meine Variante baue. Fangen wir mit der Einkaufsliste an:
Zutaten
ZMR250 Rahmen von Banggood (Link)
Ich habe mich für die extrem günstige Variante aus Fiberglas entschieden – nur €15,–!
D4R-II EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... (Banggood Link) ca. €28,–
Motoren DYS BE1806 2300KV von Banggood (Link)
Zur Sicherheit habe ich fünf Stück bestellt zu je ca. €9,–.
Propeller Gemfan 5×3 von Banggood (Link)
oder Gemfan 6×3 für mehr Power (Link)
Auch hier ist es besser, mehrere Packungen á vier Stück zu je ca. €2,– zu ordern.
ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... Afro (Hobbyking Link)
Besser fünf Stück bestellen!
Flugakku(s) 1300mAh 3SS bezeichnet die Anzahl an Zellen, die in einem LiPo-Akku seriell hintereinander geschaltet sind. Mit jeder Zelle steigt die Spannung des Akkupacks dabei um 3,7V. Ein 1S-Akku besteht demnach aus einer Zelle und hat die Spannung 3,7V, ein 2S-Akku aus ... 45–90C LiPo (Hobbyking Link)
ESCs, Abstandhalter, Sekundenkleber und Schraubensicherungslack
Der Preis
Zählt man alles zusammen, ergeben sich folgende ungefähre Preise:
Alle Bauteile wie oben, ohne Fernsteuerung, EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... und Akkus: €181,–
Alles inkl. Taranis, D4R-II und drei Akkus: €496,–
Zu guter Letzt fehlt noch eine Videobrille oder Monitor für €60,– bis €400,– und ein Ladegerät für vielleicht €40,–.
D4R-II flashen
Zu allererst habe ich den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... mit einer neuen Firmware geflasht, die es gestattet, mehr als sechs Kanäle per CPPMCombined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! auszugeben. Im CPPMCombined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! Modus reicht ein einziges Servokabel aus, um den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... mit dem Naze-Board zu verbinden. Leider ist im Auslieferungszustand des D4R-II die Länge eines Frames mit 17ms ein bisschen zu kurz, um auf diese Weise alle acht Kanäle zu benutzen. (Video dazu) Also Bietet FrSky eine Firmware an, die die Frame-Länge aus 27ms erhöht und damit das Problem löst. Eine ausführliche Anleitung dazu gibt es in vielen YouTube-Videos und auch von FrSky selbst als PDF-Dokument: How To Upgrade D4R-II.
Warum sollte man für einen MiniQuad mehr als fünf Kanäle benutzen? Muss man sich überhaupt die Mühe machen, das Naze-Board zu flashen? Ich finde schon, denn wenn man bis zu acht Kanäle zur Verfügung hat, kann man an seiner Fernsteuerung viele tolle Funktionen des Naze sehr einfach und übersichtlich direkt auf Schalter legen. Z.B. kann man die Flugzustände (flight modes) umschalten, die LEDs ein- und ausschalten, das Barometer und/oder den Kompass an- und abschalten, den Piepser zum Suchen anschalten etc. Gepaart mit der Sprachausgabe der Taranis ergibt das schon viel Spaß!
Doch dazu später mehr! Eine vollständige Anleitung zum Programmieren der Taranis findet Ihr übrigens auch bei uns.
Motoren anbringen
Als nächstes habe ich auf jeden Motor den kleinen Prop-Adapter geschraubt (mit blauem Schraubensicherungslack natürlich!) und die Motoren auf den Armen des ZMR250 befestigt (ebenfalls mit „LocTite“). Hier ein paar Fotos dazu:
Motor mit allen Schrauben
Prop-Adapter festgeschruabt
Rahmenteile des ZMR250
drei lose Schrauben zum Halten
vier feste Schrauben
vier Arme
Die vier Arme mit Motoren
Die ESCs
Um Platz und Gewicht zu sparen und um alles schick zu machen habe ich die Kabel der Motoren direkt auf die ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... gelötet, die ich vorher aus dem Schrumpfschlauch ausgepackt habe. Dann habe ich sie mit doppelseitigem Schaumstoff-Klebeband auf die Arme geklebt und zum Schluss den ganzen Arm neu eingeschrumpft.
ESC
ESC ohne Schrumpfschlauch
Kabel vom ESC ablöten
alle Kabel entfernt
Länge der Motorkabel ausmessen
gekürzte Motorkabel
doppelseitiges Schaumstoffklebeband
Klebeband unter den ESC kleben
ESC fertig montiert
2 gerade durchgehend verkabelte ESCs und zwei mit vertauschten Litzen
passender Schrumpfschlauch
2 verschrumpfte Arme
Rahmen und Power Distribution
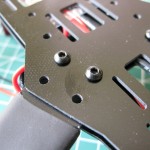
Um die Stromkabel der ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... und überhaupt die ganze Stromversorgung in Angriff nehmen zu können, baut man jetzt am besten die Grundplatte des ZMR250-Rahmens mit den roten Alu-Stangen auf, und zwar mit den längeren Schrauben, die bei dem Kit dabei sind. Wer will, kann auch schon das Naze-Board montieren. Ich habe die vier Arme ebenfalls schonmal provisorisch angebracht, damit ich alle Kabellängen richtig abschneiden kann. Welcher Arm wo angebracht wird, habe ich auf den Fotos unten beschriftet.
Rahmen-Unterteil
lange und kurze Schrauben für den Rahmen
Nylon Hex Spacer fürs Naze-Board
Bullet-Connectors abgetrennt
Unterseite
Oberseite
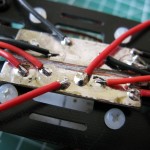
Die einfachste Methode, alle ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ..., das Video-Equipment und den Spannungssensor mit Batteriestrom aus dem Flugakku zu versorgen, ist es, ein Stück doppelseitige Platine zu nehmen, einen dünnen Streifen des Kupfers herauszutrennen und alle Kabel direkt da drauf zu löten. Dafür empfiehlt es sich, eine dicke Lötspitze zu nehmen. Anschließend kann man mit einem Stückchen Plastik eine Isolierung herstellen:
Platinenstückchen
mit Rille
testen, ob kein Kurzschluss besteht
alles OK: kein Kurzschluss
Mein Lötkolben
dünne und dicke Lötspitze
beide Seiten verzinnen
alle Kabel einfach drauflöten
rats nest?
alte Verpackung vom D4R-II
Plastik dient als Isolierung
Für den Anschluss an den Akku habe ich etwas dickere Kabel verwendet. Außerdem habe ich zwei kleine JST-Stecker zusätzlich auf das selbstgebastelte „Power Distribution Board“ gelötet, um die Videokamera zu versorgen und den Sensor-Eingang des Naze-Boards. Dann kann man auch schon die untere Rahmenplatte montieren! Dabei sollte man drauf achten, dass keine Kabel zwischen den Armen und dem Rahmen eingequetscht werden. Es ist ein bisschen fummelig, alle diese Schrauben und Arme festzuhalten, ohne dass sie auseinanderfallen, aber es geht!
untere Rahmenplatte fertig zur Montage
hier auch nur die längeren Schrauben verwenden!
fummelige Schrauben
fertig zusammengeschraubt
So sieht es schon wie ein echter Quad aus!
Zum Schluss habe ich den XT60-Stecker an die Anschlusskabel gelötet. Dafür habe ich sie auf ca. 7cm abgeschnitten. Nicht vergessen, vorher den Schrumpfschlauch auf die Kabel zu stecken! Zum Schluss habe ich nochmals auf Kurzschlüsse getestet und dann die ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... mit einem Servotester angetestet.
7cm Kabel
verzinnt und mit Schrumpfschlauch
XT60-Stecker
auf Kurzschluss in der Verkabelung prüfen
alles OK: kein Kurzschluss
ESCs mit Servo-Tester anwerfen
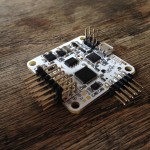
Das Naze-Board
Hier zeige ich nochmal, was an welchen Pin angeschlossen wird. An mein Naze-Board habe ich alle Pins drangelötet. Dadurch braucht es mehr Platz. Aber die Verbindungen sind leichter zu trennen, falls man sich vertut.
Das Naze32 mit Pins
die Rückseite
Buzzer
Der Buzzer ist sehr nützlich, um den Quad zu finden, falls man nicht genau weiß, wo er abgestürzt ist. Dann kann man ihn per Fernsteuerung aktivieren. So wird er angeschlossen:
mit Buzzer
Empfänger
Um den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... an das Board anzuschließen reicht ein einziges female-to-female Servokabel aus. Beim D4R-II müssen die Pins von Kanal 3 und 4 mit dem kleinen Jumper kurzgeschlossen werden, um ihn in den CCPM-Modus zu versetzen. Das Servokabel kommt dann an den Kanal 1:
Naze und D4R-II
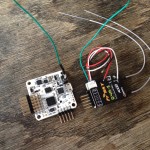
Telemetrie
Um sich per Telemetrie einige wichtige Daten wie z.B. die Batteriespannung auf der Fernsteuerung anzeigen lassen zu können, muss man den Telemetrie-Port des D4R-II Empfängers mit dem richtigen Pin des Naze-Board verbinden. Man braucht tatsächlich nur das grüne Kabel des von FrSky mitgelieferten Steckers zu benutzen, denn der —-Pol ist bereits durch das Servokabel verbunden. Die drei restlichen Litzen kann man eigentlich abschneiden:
grünes Kabel für Telemetrie
Pin neben USB
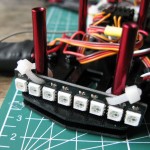
LEDs
Wenn man die WS2811 oder WS2812 LEDs am Naze-Board benutzen will, muss man den „Data In“-Anschluss des ersten LED-Elements mit dem RC-Pin 5 auf dem Naze-Board verbinden.
Naze mit LEDs
RC-Pin 5
Die Spannung zum Betrieb der LEDs kann man aus einem der Servostecker der ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... entnehmen, da nur ein ESCElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... nötig ist, um das Naze-Board und den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... zu betreiben. Wichtig ist, dass diese LEDs das Steuersignal nur als solches erkennen, wenn seine Spannung fast die gleiche ist wie die, mit denen man die LEDs betreibt (die am Vin-Anschluss der LEDs). Deshalb ist es manchmal nötig, zwischen den Pluspol des ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... und den Vin-Anschluss der LEDs eine Diode einzusetzen, um so die Spannung ein bisschen zu reduzieren. Wer trotzdem Probleme mit flackernden LEDs hat, sollte auf einen eigenen kleinen BECBattery Elimination Circuit. Elektronische Schaltung, die aus der relativ hohe Spannung von z.B. 3S Akkus eine Spannung macht, die Komponenten wie ein FC oder Servo benutzen können, meist 5V. zurückgreifen, um die LEDs mit Spannung zu versorgen. Link zur Original-Dokumentation .
Batteriespannung
Zum Messen der Spannung des Flugakkus werden zwei Kabel an diese Pins auf dem Naze-Board angeschlossen. Dabei unbedingt + und — beachten, da sonst das Board frittiert wird. Dieser Eingang kann auf dem Naze32 Board bis zu 25V oder 6SS bezeichnet die Anzahl an Zellen, die in einem LiPo-Akku seriell hintereinander geschaltet sind. Mit jeder Zelle steigt die Spannung des Akkupacks dabei um 3,7V. Ein 1S-Akku besteht demnach aus einer Zelle und hat die Spannung 3,7V, ein 2S-Akku aus ... Akkus aushalten. Andere Boards können z.B. nur bis zu 3,3V vertragen – hier muss man dann einen Spannungsteiler einbauen.
Batterie-Spannung
+ und – beachten!
Empfänger und Naze einbauen
Den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... habe ich mit etwas Klettband unter dem Naze-Board befestigt. Für die Telemetrie habe ich ein extra kurzes Kabel gelötet. Beim Anschließen der vier Stecker von den ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... an das Naze-Board muss man auf die richtige Reihenfolge achten! Bei ESCElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... 2 und 3 habe ich das rote Kabel aus den Servosteckern herausgezogen, den Kontakt zurückgebogen und mit Schrumpfschlauch am Kabel festgemacht, damit das Naze Board nur vom ersten ESCElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... mit 5V versorgt wird. Auch beim 4. ESCElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... habe ich das rote Kabel aus dem Servostecker herausgezogen, damit ich es als Spannungsquelle für die LEDs benutzen kann (s.u. „LEDs einbauen“).
Klettband
kurzes Kabel für Telemetrie
Empfänger mit den beiden einzigen nötigen Kabeln
Empfänger sitzt
Naze-Board angebracht
beide Boards sitzen
Alle Verbindungen gesteckt
FPV-Kamera und -Sender
Einbauen
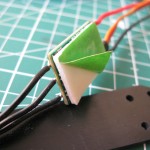
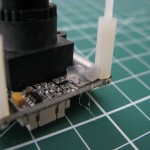
Die kleine FPVFirst Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... Bordkamera wird mit den M2 Nylon Abstandhaltern an der kleinen Schwarzen Frontplatte des ZMR250-Rahmens befestigt. Dabei habe ich sicherheitshalber einen kleinen Tropfen Heißkleber auf den Quarz gegeben, damit er sich nicht losrüttelt. Außerdem muss der nutzlose Rand aus unbenutzter Platine rund um die Kamera abgetrennt werden. Die überstehenden Gewinde der Nylon Spacer habe ich abgeschnitten, weil die Kameraplatte sonst an den roten Alu-Pfosten des Rahmens anstößt.
neue Kamera
nutzlose Umrandung abtrennen
nutzlose Umrandung abgetrennt
Nylon Hex Spacer montiert
Quartz mit Heißkleber fixiert
Kameraplatte
Gewinde kürzen
Kamera auf Platte festgeschraubt
passt perfekt
Nachdem ich die nötigen Öffnungen in das Plastik um den Videosender herum ausgeschnitten hatte, konnte ich die Verkabelung der FPV-Sachen herstellen. Auch hier habe ich einen kleinen JST-Stecker verlötet, der zu dem an der Power-Verteiler-Platine passt. Ich habe alles so befestigt, dass es unter der oberen Rahmenplatte des ZMR 250 befestigt ist.
Plastik wegschneiden
Kabel vom Sender
Einstellen
Vor dem endgültigen Einbau der oberen Rahmenplatte mit den FPV-Sachen habe ich an die Kamera das kleine zusätzliche Board angeschlossen, mit dessen Hilfe man in das Menü der Kamera kommt. Dort empfiehlt es sich, einige Einstellungen an der Bildqualität des Videos vorzunehmen, um günstige Bedingungen zum FPV-Fliegen zu haben. (Lässt man den Objektivdeckel auf der Kamera, kann man die Menüs besser lesen.) Meine Einstellungen sind auf den Fotos unten zu sehen:
Das Tastenfeld für die Kamera
Mit dem Menu-Knopf ins Hauptmenü
Der Pfeil bedeutet, mit der „Manu“-Taste ins Untermenü
digital wide dynamic range
LCD, und dann „Menu“ für mehr
„LCD“ mit links und rechts, dann „Menu“ für mehr
Kontrast u. Schärfe
Ped ist der Schwarzpunkt
LEDs enbauen
Die bunten LEDs einzubauen war etwas fummelig, weil jetzt schon beinahe der gesamte Platz von irgendwelchen Kabeln verbraucht war. Doch ich habe noch mehr reinbekommen:
Fertig gebaut!
So, der kleine Quad ist fertig! Er wiegt mit 1300mAh-Akku 509g und ohne Akku 394g. Jetzt geht’s daran, ihn zu programmieren.
509g mit Akku
CleanFlight
Zum Programmieren des Naze32 benutze ich CleanFlight. Ich finde es übersichtlicher und irgendwie moderner als BaseFlight. Man kann es umsonst für Windows und Mac OS X auf der Seite cleanflight.com herunterladen, und zwar als App für Googles Chrome-Browser. Toll! Eine vollständige Anleitung zum Programmieren der Taranis findet Ihr übrigens auch bei uns.
CleanFlight Startbildschirm
CleanFlight verbunden
Wenn man das Naze Board per USB mit dem Rechner verbunden hat, klickt man oben in der Menüleiste auf Connect, um die Software zu verbinden. Bevor man dies tut, sollte man aber ein Update der Firmware auf dem Board durchführen. Dazu muss man zwar das USB-Kabel verbinden, aber nicht auf den Connect-Knopf in der Software klicken. Denn nur im Startbildschirm finden sich der Reiter „Firmware Flasher“. Dort muss man aus der Liste unbedingt das richtige Board auswählen!
Nun kann man sich verbinden und alle Einstellungen nach seinen Wünschen vornehmen. Ich zeige hier für jeden der Reiter, wie ich mein Naze Board konfiguriert habe und erkläre kurz, warum.
Im Reiter „Ports“
muss man FrSky-Telemetrie aktivieren, wenn man sie benutzen möchte:
CleanFlight Ports
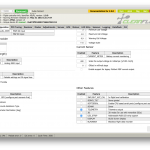
Im Reiter „Configuration“
werden dann viele grundlegende Einstellungen gemacht. Receiver Mode• Modus der Fernsteuerung, z.B. „Mode 2“. Welcher Knüppel steuert welche Funktion? • Flugzustand (flight mode) eines Modells, z.B. „Acro Mode“. More: RX_PPM bedeutet, dass man den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... mit nur einem Kabel per CPPMCombined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! mit dem Naze verbindet. Battery Voltage: VBAT bedeutet, dass man zwei Pins auf dem Naze dazu benutzt, die Batteriespannung des Flug-Akkus zu überwachen. Other Features: TELEMETRY bedeutet, dass das Naze-Board Telemetriedaten an einem bestimmten Pin ausgibt. Verbindet man diesen mit dem FrSky D4R-II, so erhält man viele Werte auf dem Display der Taranis (z.B. die Spannung des Flugakkus, s.o.!). LED_STRIP bedeutet, dass man den RC-Pin 5 dazu benutzt, die bunten LEDs anzusteuern.
Configuration 1
Configuration 2
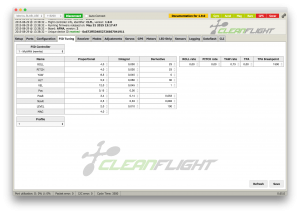
Die PIDs
An den PIDs, die ja so wichtig für das Flugverhalten und das Ansprechen des Quads auf Steuerbefehle sind, habe ich nicht allzuviel an den Einstellungen geändert, die das Naze Board schon vorgab. Allerdings habe ich den Algorithmus auf die Variante „1 MultiWii (Rewrite)“ umgestellt und die Yaw-Rate auf 0,73 erhöht. Zu dem Thema PIDs in Cleanflight gibt es tausende Youtube-Videos und Ratgeber. Am Ende muss jeder selbst probieren, bis er das Ideal gefunden hat. Hier sind meine Einstellungen zum Anfangen:
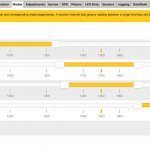
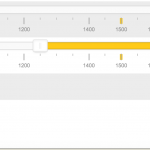
Der Reiter „Receiver“
stellt Werkzeuge zur Verfügung, mit denen man sein Naze-Board und seinen EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... optimal aufeinander einstellt. Hier ist es wichtig, dass in der Neutralstellung der Knüppel die Werte 1500 betragen und an den Enden genau 1000 bzw. 2000 erreichen.
CleanFlight Receiver
Im Reiter „Modes“
wird festgelegt, welche Flugzustände wie aktiviert werden. Ist keiner der Modes aus der List aktiviert, dann ist automatisch der „Acro“-Mode aktiv, sobald man das Board mittels der Steuerknüppel scharfgeschaltet hat. Möchte man lieber mit einem Schalter an der Funke das Board armen, stellt man hier einen Bereich dafür beim ersten gelisteten Mode• Modus der Fernsteuerung, z.B. „Mode 2“. Welcher Knüppel steuert welche Funktion? • Flugzustand (flight mode) eines Modells, z.B. „Acro Mode“. More „Arm“ ein.
CleanFlight Modes 1
weitere CleanFlight Modes
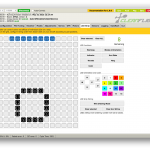
Im Reiter „LED Strip“
werden die LEDs programmiert. Hierzu gibt es eine tolle Anleitung und viele gute YouTube-Video s. Grob gesagt ist es so, dass man im „Wire Ordering Mode“ alle LEDs in der Reihenfolge in das Schachbrett einträgt, in der man sie verkabelt hat. Dabei stellt das Schachbrett ungefähr dar, wo am Quad sich die jeweiligen LEDs befinden. Nach dem Verlassen des Wire Ordering Modes legt man für jede eingetragene LED fest, in welche Richtung sie zeigt (Nord, Ost, Süd, West, oben, unten oder eine beliebige Kombination). Und dann weist man jeder LED eine Funktion oder Farbe zu. So sieht es bei mir aus:
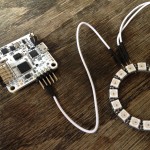
Um mit der Taranis auch Bind’n’Fly-Modelle von HorizonHobby fliegen zu können (z.B. die ganzen coolen Blade-Helikopter), kann man entweder das Orange Modul von Hobbyking kaufen und damit leben, dass man nur DSM2 benutzen kann. ODER man bastelt sich aus einer alten DX4e oder DX5 und einem leeren Modulgehäuse ein echtes DSMX-Modul selbst! Die Firmware der Taranis hat einen eigenen Menüpunkt dafür. Und das bedeutet, dass das selbstgebaute Modul nicht über den Umweg von CPPMCombined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! angesteuert wird, sondern die Taranis kommuniziert tatsächlich direkt in der Spektrum-Sprache mit dem HF-Chip. Das bedeutet geringere Latenz.
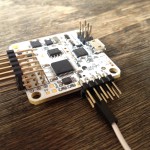
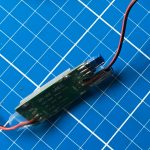
Bei diesem Projekt habe ich mich weitestgehend an der [fancy_link link=“http://johnprikkel.blogspot.de/2014/07/jr-dsmx.html“ variation=“teal“ target=“blank“]Anleitung von John Prikkel[/fancy_link] orientiert. Das schwierigste war es, das Original-HF-Modul aus der alten DX4e rauszulöten, ohne etwas zu zerstören. Nach geglückter Operation ist die DX4 übrigens weiter uneingeschränkt als Schüler-Funke nutzbar, denn der PPM-Output auf der Rückseite ich nicht beeinträchtigt.
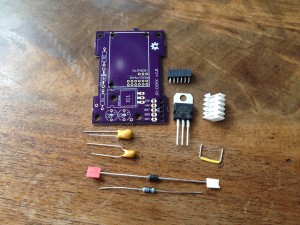
Diese Teile werden benötigt:
IC1 LD1117V33
R1 4.7K (5%, 1/2 Watt)
R2 Drahtbrücke
D1 1N4001
C1 1uF
C2 10uF
JP1 Molex 538-22-14-2054
JP2 Harwin M22-7140642
Gehäuse: [fancy_link link=“http://www.horizonhobby.com/products/integrated-case-for-jr-compatible-air-module-SPM6817″ variation=“teal“ target=“blank“]DM9-Leergehäuase von Spektrum[/fancy_link]
Dieser Einkaufskorb bei Mouser Elektronik Versand enthält die benötigten Teile:
[fancy_link link=“http://www.mouser.com/ProjectManager/ProjectDetail.aspx?AccessID=027ba40aa6″ variation=“teal“ target=“blank“]Mouser Projekt[/fancy_link]
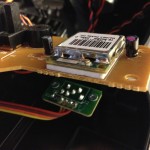
Hier sind ein paar Fotos:
Dies sind die Teile, die benötigt werden:
In diesem Video kann man sehr gut sehen, wie gering die Latenz mit diesem Modul ist. In der Taranis eingesetzt zum Steuern eines Blade mCPX Helis ist in der echten Welt keinerlei Verzögerung zu sehen. Lediglich die Zeitlupe zeigt einen winzigen Unterschied: