

Projekt Kamera-Hex Teil 1
Mein neuer Plan ist es, einen Hexacopter zu bauen. Das Projekt steht noch ganz am Anfang.
Er soll am Ende vor allem als Plattform für kleinere Kameras dienen. Deshalb werde ich versuchen, einen Antrieb zu bauen, der diese Nutzlast heben kann. Außerdem soll der Hexa ein Kamera-Gimbal bekommen. Deshalb wäre es praktisch, wenn der Flight Controller Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... bereits Funktionen dafür hat. Ein leichter Rahmen ist angesagt.
Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... bereits Funktionen dafür hat. Ein leichter Rahmen ist angesagt.
Um die Übersicht zu behalten, gliedere ich dieses Projekt in mehrere Teile:
- Dies ist Teil 1.
- Teil 2 beschreibt nun den Bau des eigentlichen Hexacopters, ohne aber ein Gimbal
 Eine Vorrichtung, um eine Kamera so an einem ferngesteuerten Flugmodell zu befestigen, dass die Kamera trotz der Bewegungen des Fluggeräts beim Flug ein absolut ruhiges Bild liefert. Dazu wird die Kamera in mindestens zwei Achsen, oft in drei Achsen... und eine Kamera zu montieren.
Eine Vorrichtung, um eine Kamera so an einem ferngesteuerten Flugmodell zu befestigen, dass die Kamera trotz der Bewegungen des Fluggeräts beim Flug ein absolut ruhiges Bild liefert. Dazu wird die Kamera in mindestens zwei Achsen, oft in drei Achsen... und eine Kamera zu montieren. - Teil 3 wird sich mit dem Pixhawk beschäftigen. Was wird wo angeschlossen? Wie wird er programmiert? Welche (Bodenstations-)Software gibt es? 433MHz-MAVLink-Funk, Flight Modes, die Fernsteuerung etc. werden eingestellt.
- In Teil 4 soll bewiesen werden, dass der Hex tatsächlich fliegt. Der Autopilot soll besser kennengelernt werden. Es soll getestet werden, wieviel Nutzlast getragen werden kann und ob die Berechnungen con Ecalc stimmten.
- In den folgenden Teilen soll dann beschrieben werden, wie und welches Gibal montiert wird, wie die Kamera befestigt wird etc.
Der Rahmen ist das einzige Teil, das ich bereits habe. Es ist der Hobbyking Talon 625 aus Carbon und Alu.


Nachdem ich einen Tag damit verbracht habe, verschiedene Antriebs-Komponenten in Erwägung zu ziehen und vor allem die Kombinationen mit dem Online-Rechner für Flugmodelle ecalc.ch durchzurechnen, habe ich auch bereits einige Teile bestellt:
Einkaufszettel
- Rahmen:
Talon 625
ca. €65,– - Propeller:
Hobbyking Karbon 12×5.5
ca. €9,– für 2 Stück - Motoren:
Quanum 3110 470kv
ca. €18,– pro Stück - ESCs
 Electronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ...:
Electronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ...:
Multistar 20A opto
ca. €6,50 pro Stück - FCFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn...:
Hobbyking Pixhawk
ca. €110,–
oder Banggood Pixhawk
ca. €53,– - Flugakku:
Turnigy Heavy Duty 5000mAh 6S 60C LiPo
ca. €68,– - Power Distribution Board
 Power Distribution Board. Platine zur Verteilung des Stroms aus dem Antriebsakku. PDB aus einem Stück Platine selbst gebastelt Tarot PDB:
Power Distribution Board. Platine zur Verteilung des Stroms aus dem Antriebsakku. PDB aus einem Stück Platine selbst gebastelt Tarot PDB:
Tarot Hex PDB
ca. €2,70 - Empfänger
 Receiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi...:
Receiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi...:
FrSky X4R SB (von Banggood)
oder FrSky X4R SB (von Hobbyking)
ca. €26,– - 433MHz Telemetrie MAVLink:
Hobbyking Funkmodule
ca. €33,–
Hintergründe für diese Auswahl
Nach den bekannten Ohm’schen Gesetzen steigt der Verlust durch Widerstand in elektrischen Leitungen mit dem Strom quadratisch an, mit der Spannung steigt er nur linear an. Deshalb gibt es vom Stromkraftwerk über Land Hochspannungsleitungen, der Strom wird erst kurz vor den Haushalten auf 230V herunter transformiert. So kann man dieselbe Leistung verschicken, ohne viel Verlust in Wärme zu stecken. (Siehe Wikipedia-Artikel über Hochspannungsleitungen)
Deshalb habe ich entschieden, dass der Antrieb mit 6SS bezeichnet die Anzahl an Zellen, die in einem LiPo-Akku seriell hintereinander geschaltet sind. Mit jeder Zelle steigt die Spannung des Akkupacks dabei um 3,7V. Ein 1S-Akku besteht demnach aus einer Zelle und hat die Spannung 3,7V, ein 2S-Akku aus ... erfolgen soll.
Außerdem benutze ich die größten Propeller, die auf diese Plattform passen, 12″, mit einer Steigung von 5.5″.
All das führt dazu, dass die ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... zwar tauglich für 6SS bezeichnet die Anzahl an Zellen, die in einem LiPo-Akku seriell hintereinander geschaltet sind. Mit jeder Zelle steigt die Spannung des Akkupacks dabei um 3,7V. Ein 1S-Akku besteht demnach aus einer Zelle und hat die Spannung 3,7V, ein 2S-Akku aus ... sein müssen, aber nur 20A aushalten müssen. Wie man sieht, orientieren sich meine Zahlen und Komponenten stark an dem 6SS bezeichnet die Anzahl an Zellen, die in einem LiPo-Akku seriell hintereinander geschaltet sind. Mit jeder Zelle steigt die Spannung des Akkupacks dabei um 3,7V. Ein 1S-Akku besteht demnach aus einer Zelle und hat die Spannung 3,7V, ein 2S-Akku aus ... Upgrade Kit für Hexakopter, das es von DJI zu kaufen gibt. Damit dürfte es ziemlich effizient sein, denn dafür ist DJI unter anderem ja bekannt.
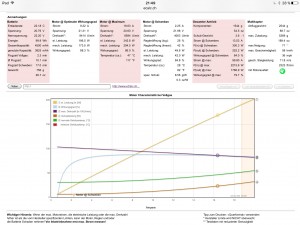
Berechnungen
Ausgehend von den Daten des Antriebssets von DJI habe ich die obigen Komponenten in den Rechner bei Ecalc eingegeben. Hohe Spannung heißt niedrige kV-ZahlUmdrehungen pro Minute pro Volt. Diese Kennzahl gibt bei bürstenlosen Brushless Motoren an, wieviele Umdrehungen pro Minute der Motor pro Volt erreicht, das ihm zugeführt wird. Hat ein Motor z.B. 1400kV und er wird mit einem 3S LiPo-Akku (entsprich... für die Motoren. Die größten Propeller, die auf den 625er Rahmen passen, sind 12″ groß. Bei kräftigen Motoren darf man ruhig mal eine hohe Steigung von 5,5″ bei den Props wählen. Die Werte, die hier errechnet wurden, stimmen mich optimistisch:
- Ein Motor beim Schweben: 2,25A, 49,6W
- Gesamter Antrieb beim Schweben: 13,53A, 300W
- Strom maximal: 99,8A
- Maximale Zuladung: 5,3kg! (Das wird später das GimbalEine Vorrichtung, um eine Kamera so an einem ferngesteuerten Flugmodell zu befestigen, dass die Kamera trotz der Bewegungen des Fluggeräts beim Flug ein absolut ruhiges Bild liefert. Dazu wird die Kamera in mindestens zwei Achsen, oft in drei Achsen..., die Kamera und das Ladegestell!)

Ein Gedanke zu „Kamera-Hex, Teil 1: Idee“