Wir fliegen im Wohnzimmer rum und ihr könnt zugucken! https://www.twitch.tv/JochenCGN
Autor: Till
Einer der Macher von Copter Cologne. Im "echten Leben" Filmton-Mensch. Interesse an Basteleien jeglicher Art schon als Teenager.
Wir auf Twitch

Seit ein paar Tagen arbeiten wir daran, einen Twitch-Kanal für euch zu eröffnen. Ziel ist es, live von der Grünen Wiese zu übertragen, wann immer wir mit unseren Coptern, Drohnen und anderen Geräten in die Luft gehen.
Stay tuned!
Nur noch unter 100m?
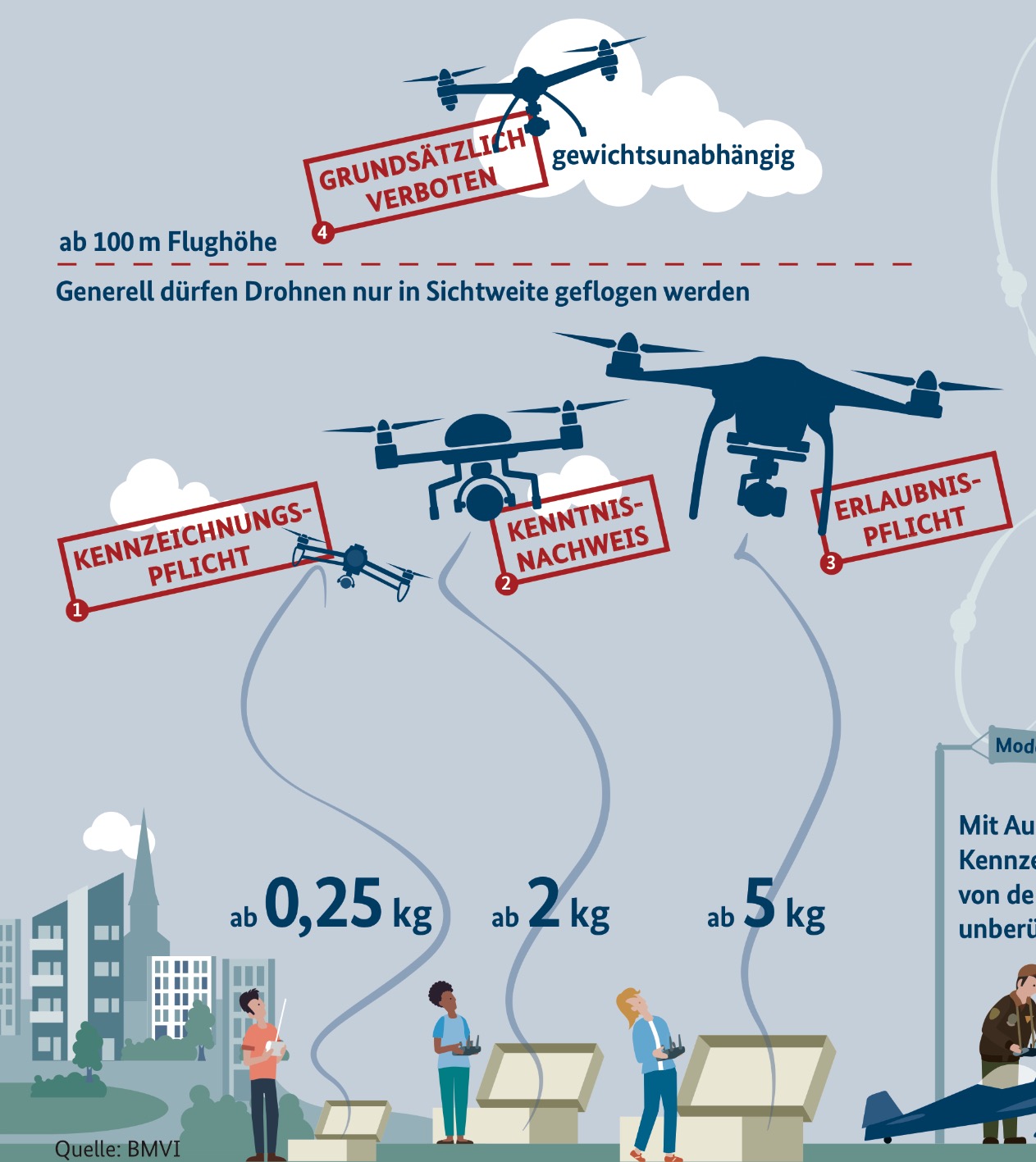
Dobrindt (CSU) hat einen Entwurf vorgelegt, nach dem künftig alle ferngesteuerten Flugmodelle und Drohnen auf der „Grünen Wiese“ nur höchstens 100m hoch fliegen dürften. Der Bundesrat muss noch zustimmen.
Die neuen Regelungen könnt Ihr hier nachlesen: https://www.bmvi.de/SharedDocs/DE/Publikationen/LF/flyer-die-neue-drohnen-verordnung.pdf?__blob=publicationFile
Damit das nicht einfach durchgewunken wird, macht bitte bei dieser Online-Aktion des dmfv.aero mit!
C.C#8

Der 8. Copter.Cologne-Stammtisch ist zwar nicht der bestbesuchte, aber er ist der erste, der hier einen Artikel bekommt, während wir noch in der Kneipe sitzen. Das Internet ist überall, bald werden es auch unsere Copter sein! 😉



Neues Glossar

Ab sofort gibt es auf unserer Seite eine Funktion, die Abkürzungen, Fremdwörter, Fachbegriffe und vieles mehr erklären kann. Die Begriffe, die wir in unserer Erklär-Datenbank gespeichert haben, werden in allen Texten wo sie auftauchen hervorgehoben. Fährt man den Mauszeiger über das Wort, öffnet sich eine Sprechblase. Möchte man mehr erfahren, bringt einen ein Klick zum vollständigen Artikel über den Begriff.
Probiert es aus:
Habt Ihr Euch nicht schon immer gefragt, was ein ESC ist oder was der Unterschied zwischen CCPM und CPPM ist?
Was fehlt Euch?
Schreibt uns [fancy_link link=“http://copter.cologne/forum/unsere-projekte/neues-glossar/“]ins Forum[/fancy_link], welche Begriffe Euch fehlen, welche Ihr gerne wissen würdet! Wir versuchen, die Liste und unsere Datenbank immer zu erweitern!
C.C#7

Der 7. Stammtisch war wieder mal sehr gut besucht.




Wie fliege ich legal?

Was muss ich beachten, wenn ich mein ferngesteuertes Fluggerät fliegen lassen möchte?
Hier sollen einige Hinweise gegeben werden, die dabei helfen zu entscheiden, ob es legal ist an dieser oder jener Stelle seine Drohne oder sein ferngesteuertes Flugzeug fliegen zu lassen. Was muss beachtet werden, um legal zu handeln?
[warning_box]Dieser Beitrag stellt kein offizielles Dokument dar. Jeder Mensch ist für sein eigenes Handeln verantwortlich. Wir übernehmen keinerlei Haftung für die Richtigkeit der Informationen auf dieser Seite oder für die Folgen aus Handlungen, die aus Empfehlungen auf dieser Seite resultieren.[/warning_box]
[note_box]Diese Seite stellt keinen Anspruch auf Vollständigkeit oder Richtigkeit. Wenn Euch Fehler auffallen oder weitere Quellen oder Texte, die das Thema behandeln, schreibt uns! Wir werden diesen Text auf dem Laufenden halten.
[email_link email=“mail@copter.cologne“]mail@copter.cologne[/email_link]
[/note_box]
Voraussetzungen
Das muss gegeben sein, bevor ich starte
[fancy_list style=“arrow_list“]
- Ich muss eine spezielle Haftpflichtversicherung besitzen. Die normale reicht nicht. Am einfachsten ist es, eine solche Haftpflichtversicherung abzuschließen, indem man Mitglied in einem Modellflug-Verein wird, bei der die Versicherung inbegriffen ist. Der DMFV als größter deutscher Dachverband vieler Modellflugvereine bietet auch für Einzelpersonen coole Versicherungsoptionen an. Nützlicher Nebeneffekt: Die Interessen von uns Modellfliegern z.B. gegenüber aktuellen Verkehrspolitischen Entscheidungen werden vom DMFV exzellent vertreten.
[fancy_link link=“https://www.dmfv.aero/versicherung/versicherungen-fuer-modellflug-einzelmitglieder/“ target=“blank“]DMFV-Versicherungsangebot[/fancy_link] - Ich muss mindestens 1,5km vom nächsten Flughafen entfernt sein.
[fancy_link link=“https://www.dmfv.aero/allgemein/fliegen-in-der-naehe-von-flughaefen/“ target=“blank“]https://www.dmfv.aero/allgemein/fliegen-in-der-naehe-von-flughaefen/[/fancy_link]
Interaktive Karte dazu:
[fancy_link link=“https://droneable.openaip.net“ target=“blank“]https://droneable.openaip.net[/fancy_link] - Grüne Wiese: Beim Fliegen außerhalb spezieller Modellflugplätze von Vereinen: Das Modell darf nicht schwerer sein als 5kg Quelle?
- Grüne Wiese: Beim Fliegen außerhalb spezieller Modellflugplätze von Vereinen: Nur Elektro-Antriebe sind erlaubt. Quelle?
- Man muss das Modell immer mit den bloßen Augen ohne Hilfsmittel wie Ferngläser beobachten und steuern können. Quelle?
- Für Modelle mit Kamera gelten besondere Regeln!
[fancy_link link=“https://www.dmfv.aero/recht/modelle-mit-kamera-das-muss-man-wissen/“ target=“blank“]https://www.dmfv.aero/recht/modelle-mit-kamera-das-muss-man-wissen/[/fancy_link] - Für gewerbliche Flüge gelten spezielle Regeln. Gewerblich ist ein Flug z.B., wenn damit Geld verdient werden soll, wenn er eine Dienstleitung darstellt oder wenn er im Rahmen der Tätigkeit einer Firma stattfindet. U.a. muss dafür eine andere Haftpflichtversicherung abgeschlossen werden. Teilweise muss auch eine Aufstiegserlaubnis für das Modell eingeholt werden.
- DMFV zum Thema Aufstiegserlaubnis:
[fancy_link link=“https://www.dmfv.aero/recht/die-aufstiegserlaubnis-fuer-flugmodelle/“ target=“blank“]https://www.dmfv.aero/recht/die-aufstiegserlaubnis-fuer-flugmodelle/[/fancy_link]
[/fancy_list]
[note_box]Wie gesagt: Wenn Euch Fehler auffallen oder weitere Quellen oder Texte, die das Thema behandeln, schreibt uns! Wir werden diesen Text auf dem Laufenden halten.
[email_link email=“mail@copter.cologne“]mail@copter.cologne[/email_link]
[/note_box]
Akkus seriell laden
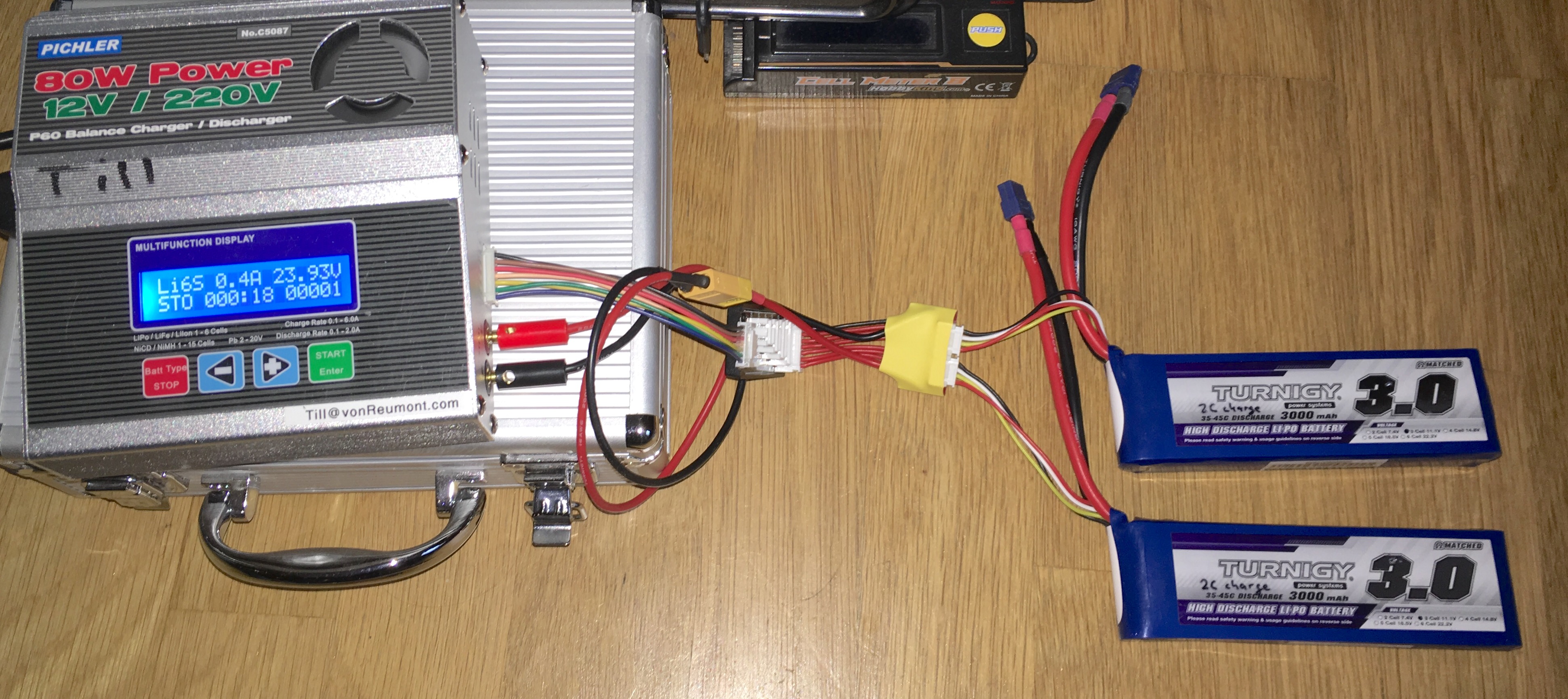
Wenn man Zeit sparen möchte, gibt es mehrere Möglichkeiten, zwei oder mehr Akkus gleichzeitig mit einem einzigen Ladegerät zu laden. In diesem Beitrag erklären wir
Serielles Laden
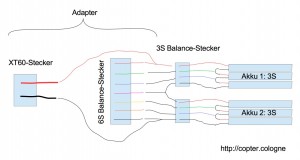
Ihr braucht dazu lediglich Euer normales Ladegerät, zwei Akkus und einen dieser Adapter:
[fancy_link link=“http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=36290&aff=1101193″ target=“blank“]Hobbyking 2x 3S Serial Adaptor[/fancy_link]
Dieser Adapter schaltet die Zellen zweier 3S-Akkus so zusammen, dass das Ladegerät einen einzigen 6S-Akku sieht:
Am Ladegerät stellt Ihr dann das ein:
[fancy_list style=“arrow_list“ variation=“green“]
- Zellenzahl = Summe aller Zellen beider Akkus zusammengezählt
- Ladestrom: Immer nur den Ladestrom einstellen, den ein Akku aushält!
[/fancy_list]
Beispiel
2x 3S, 1300mAh, 60C-fähig, 2C Ladestrom möglich
Wenn Ihr diese zwei typischen Miniqual-Akkus gleichzeitig seriell laden wollt, stellt Ihr am Ladegerät ein: 6S, 2,6A.
2x 3S, 3Ah, 20C-fähig, 1C Ladestrom möglich
Für diese beiden Tricopter-Akkus stellt Ihr ein: 6S, 3A.
[one_half]
Falsch
[fancy_list style=“arrow_list“ variation=“red“]
- Akkus mit verschiedener Zellenanzahl (z.B. 1x 2S plus 1x 4S)
- Akkus in unterschiedlichem Entladezustand (z.B. einer voll, einer leer)
- Akkus mit verschiedener Kapazität (dauert extrem lange!)
- Akkus mit völlig verschiedenen technischen Daten (dauert extrem lange)
[/fancy_list]
[/one_half]
[one_half_last]
Richtig
[fancy_list style=“arrow_list“ variation=“green“]
- Akkus mit identischer Zellenanzahl (hier z.B. 2x3S)
- Akkus mit ähnlichem Entladezustand (z.B. 2x 10,3V)
- Akkus mit gleicher Kapazität (z.B. 2x 1300mAh)
- Akkus mit ähnlichen technischen Daten (z.B. 60C Entladerate, 2C Laderate)
[/fancy_list]
[/one_half_last]
Kamera-Hex Teil 2: Bau

Projekt Kamera-Hex, Teil 2: Der Bau
Mein Ziel ist es, einen kameratragenden Hexacopter zu bauen, der mit einem Stabilisierung-Gimbal und einem möglichst intelligenten Autopiloten ausgestattet ist. Als Rahmen dafür nehme ich den Talon Hex, weil er schon ewig bei mir rumliegt. Darauf aufbauend habe ich versucht, möglichst gut passende und effiziente Komponenten zusammenzukaufen. Für den Autopiloten fiel die Wahl auf den Pixhawk, weil er wahnsinnig viele Funktionen unterstützt, und weil Hardware sowie Software Open Source sind.
Um die Übersicht zu behalten, gliedere ich dieses Projekt in mehrere Teile:
- Teil 1 war die Idee und das Vorhaben, sie umzusetzen. Außerdem habe ich in Teil 1 den Antrieb mittels Ecalc geplant, um die Komponenten bestellen zu können.
- Dieser Teil 2 beschreibt nun den Bau des eigentlichen Hexacopters, ohne aber ein Gimbal und eine Kamera zu montieren.
- Teil 3 wird sich mit dem Pixhawk beschäftigen. Was wird wo angeschlossen? Wie wird er programmiert? Welche (Bodenstations-)Software gibt es? 433MHz-MAVLink-Funk, Flight Modes, die Fernsteuerung etc. werden eingestellt.
- In Teil 4 soll bewiesen werden, dass der Hex tatsächlich fliegt. Der Autopilot soll besser kennengelernt werden. Es soll getestet werden, wieviel Nutzlast getragen werden kann und ob die Berechnungen con Ecalc stimmten.
- In den folgenden Teilen soll dann beschrieben werden, wie und welches Gibal montiert wird, wie die Kamera befestigt wird etc.
Einkaufszettel
- Rahmen:
Talon 625
ca. €65,– - Propeller:
Hobbyking Karbon 12×5.5
ca. €9,– für 2 Stück - Motoren:
Quanum 3110 470kv
ca. €18,– pro Stück - ESCs:
Multistar 20A opto
ca. €6,50 pro Stück - FC:
Hobbyking Pixhawk
ca. €110,–
oder Banggood Pixhawk
ca. €53,– - Flugakku:
Turnigy Heavy Duty 5000mAh 6S 60C LiPo
ca. €68,– - Power Distribution Board:
Tarot Hex PDB
ca. €2,70 - Empfänger:
FrSky X4R SB (von Banggood)
oder FrSky X4R SB (von Hobbyking)
ca. €26,– - 433MHz Telemetrie MAVLink:
Hobbyking Funkmodule
ca. €33,–






Der Bau
Der Rahmen
Weil ich den Rahmen schon seit einiger Zeit nutzlos hier rumliegen hatte, habe ich ihn mir zuerst nochmal ganz genau angeguckt. Dabei habe ich bemerkt, dass ich ihn damals nur provisorisch zusammengebaut hatte. Alles war schief und krumm. Also habe ich ihn komplett auseinandergenommen. Beim neuerlichen Zusammenbau habe ich diesmal drauf geachtet, dass alle Teile ganz genau sitzen. Zum Beispiel sollten die Motor-Befestigungen genau waagerecht sein. Zwei gegenüberliegende Arme des Rahmens sollten genau eine gerade Linie miteinander bilden. Und bei allen wichtigen Schrauben habe ich diesmal den blauen, mittelfesten Schraubensicherungslack (lock tite) benutzt.









Nach Anleitung in der Dokumentation in der Ardupilot-Wiki habe ich auf jeden Arm eine Nummer geklebt und einen Pfeil mit der korrekten Drehrichtung des jeweiligen Motors. Das hilft ungemein beim Testen und man muss nicht immer wieder im Internet nachschauen, welche Reihenfolge die Motoren haben.



Kabel, Stromverteilung, ESCs
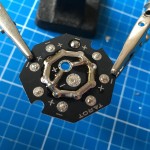
Von allen ESCs habe ich die kleinen Bullet Connectors der Stromversorgung abgelötet um sie direkt auf das Tarot Stromverteiler-Board auflöten zu können. Diese recht kleine Platine habe ich mit reichlich Lötzinn verzinnt, damit höhere Ströme problemlos passieren können.
Als Zuleitung dient hier das „Power Module“ des Pixhawk. Während der Strom aus der Batterie durch das Power Module zu dem Verteiler fließt, misst das Modul die Spannung in V und den Strom in A. Außerdem ist in dem Modul ein kleiner BEC eingebaut. Das Power Module wird mit einem sechsadrigen Kabel mit dem Pixhawk verbunden. Somit erhält der Pixhawk dadurch eine Stromversorgung und zusätzlich auch Daten über den Zustand der Batterie.
Zusätzlich habe ich einen 3A-BEC und einen extra XT60-Stecker an das Verteiler-Board gelötet:





Die Motoren
Ebenfalls mit blauem lock tite habe ich die Motoren befestigt, nachdem ich alle Litzen mit den Bullet Connectors versehen habe, die im Lieferumfang der Motoren enthalten waren. Durch die hohlen Arme des Rahmens ergibt sich eine sehr ordentliche Möglichkeit zur Verlegung der Kabel:








Verkabeln und zusammenbauen
Nachdem jetzt also alle Motoren sitzen und die Stromversorgung vorbereitet ist, kann alles zusammengesetzt und die Bodenplatte des Rahmens montiert werden. Es empfiehlt sich sehr, die Servostecker des einzelnen ESCs mit Nummern zu beschriften, die zu denen passen, die man vorher auf die Arme des Rahmens geklebt hat. Sonst weiß man hinterher einfach nicht mehr, was was ist!



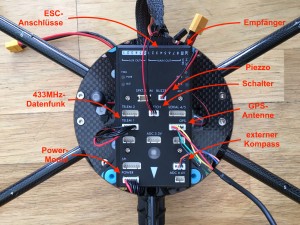
Obwohl die ESCs eine längliche Bauform haben, passten sie nicht in die Arme hinein. Der Innendurchmesser der Arme beträgt 11mm, der Außendurchmesser 14mm. Deshalb habe ich sie um die Bodenplatte herum an den Armen angebracht. Das hässliche Hobbyking-Neongrün habe ich mit schwarzem Edding unschädlich gemacht. 😉 Nachdem die Bodenplatte angebracht war und alle Kabelage in dem engen Innenraum verstaut war, habe ich den Pixhawk oben drauf montiert. Die GPS-Antenne wird mit einem hilfreichen, klappbaren Sockel geliefert. Den FrSky X4R-Empfänger habe ich am hinteren Arm befestigt. Das 433MHz-Datenfunk-Modul für die Kommunikation des Pixhawk mit der Bodenstation (Telemetrie und MAVLink) habe ich am vorderen Arm angebracht. Ohne Akku und Propeller kommt mein Kamera-Hex (der ja noch ohne Kamera ist) auf 1,3kg.



Was fehlt jetzt noch?
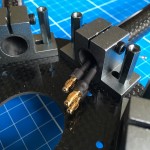
Propeller
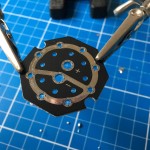
Damit der Hex abheben kann, muss ich jetzt unbedingt sechs der zehn Propeller, die ich bestellt habe, auswuchten. Meine Propeller sind aus Carbon. Das heißt, sie sind sehr leicht, aber auch sehr steif, was wiederum heißt, dass sie Vibrationen viel stärker an den Rahmen weitergeben als z.B. Plastikpropeller. Deshalb ist es hier besonders wichtig, sie sorgfältig auszuwuchten.

Und muss geprüft werden, ob sich alle Motoren in die richtige Richtung drehen. Gegebenenfalls müssen die Anschlüsse zu den ESCs verdolt werden, um das zu erreichen.


Pixhawk
Außerdem muss natürlich der Pixhawk geflasht, programmiert und initialisiert werden. Den Pixhawk hat deshalb auch das nächste Kapitel zum Thema: Teil 3 dieser kleinen Serie widmet sich ihm und der Software, die es für ihn gibt.
Das ganze Projekt:
Kamera-Hex Teil 3: Pixhawk
Projekt Kamera-Hex Teil 3: Der Pixhawk Flight Controller
Da der Pixhawk Autopilot (Flight Controller) Open Source-Hardware und -Software ist, gibt es eine Vielzahl an Stellen im Netz, an denen sich Informationen, Downloads, Firmware und Anleitungen befinden. So gibt es z.B. nicht nur eine richtige Bodenstations-Software (engl. ground control station, gcs), sondern gleich drei mächtige Programme zur Auswahl. Mit ihnen lässt sich die Firmware des Pixhawk flashen, der Pixhawk wird mit ihnen programmiert, man kann vorgegebene Routen und Wegpunkte (waypoints) planen, die dann als Mission im Pixhawk gespeichert und nacheinander abgeflogen werden, es werden Telemetriedaten wie Akkuzustand, Lage des Kopters, Ort des Kopters etc. angezeigt.
| Programm | OS | Anmerkungen | Download |
|---|---|---|---|
| http://ardupilot.org/planner/index.html
Mission Planner |
Windows | Ältestes Programm, entwickelt für den ArduPilot, hat die meisten Funktionen. | http://ardupilot.com/wp-content/plugins/download-monitor/download.php?id=82 |
| http://qgroundcontrol.org
QGroundControl |
Windows, Macintosh (bald: Android, iOS!) | Innovative Oberfläche, hauptsächlich für den Pixhawk entwickelt. Treibende Kraft ist die ETH Zürich. | https://github.com/mavlink/qgroundcontrol/releases/ |
| http://ardupilot.org/planner2/index.html
APM Planner 2 |
Windows, Macintosh, Debian, Ubuntu, Raspberry Pi | Baut auf Mission Planner und qGroundControl auf. | http://ardupilot.com/downloads/?category=35#apm_planner_20_9_laquonbspdownloads |
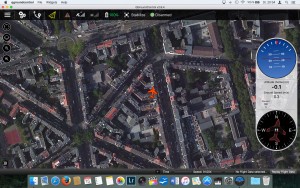
Und so sehen die Programme dann tatsächlich aus: Wie man sieht, ähneln sich Mission Planner und APM Planner 2 sehr, wohingegen QGroundControl ein etwas minimaoistischeres Design verfolgt. Auf einem kleinen China-Tablet mit Windows 10 und einem Touch-Screen merkt man schnell, dass die etwas größeren Symbole und überhaupt das ganze User Interface von QGroundControl sehr gut auf die Bedienung mit einem Finger anstatt einer Maus optimiert wurden.


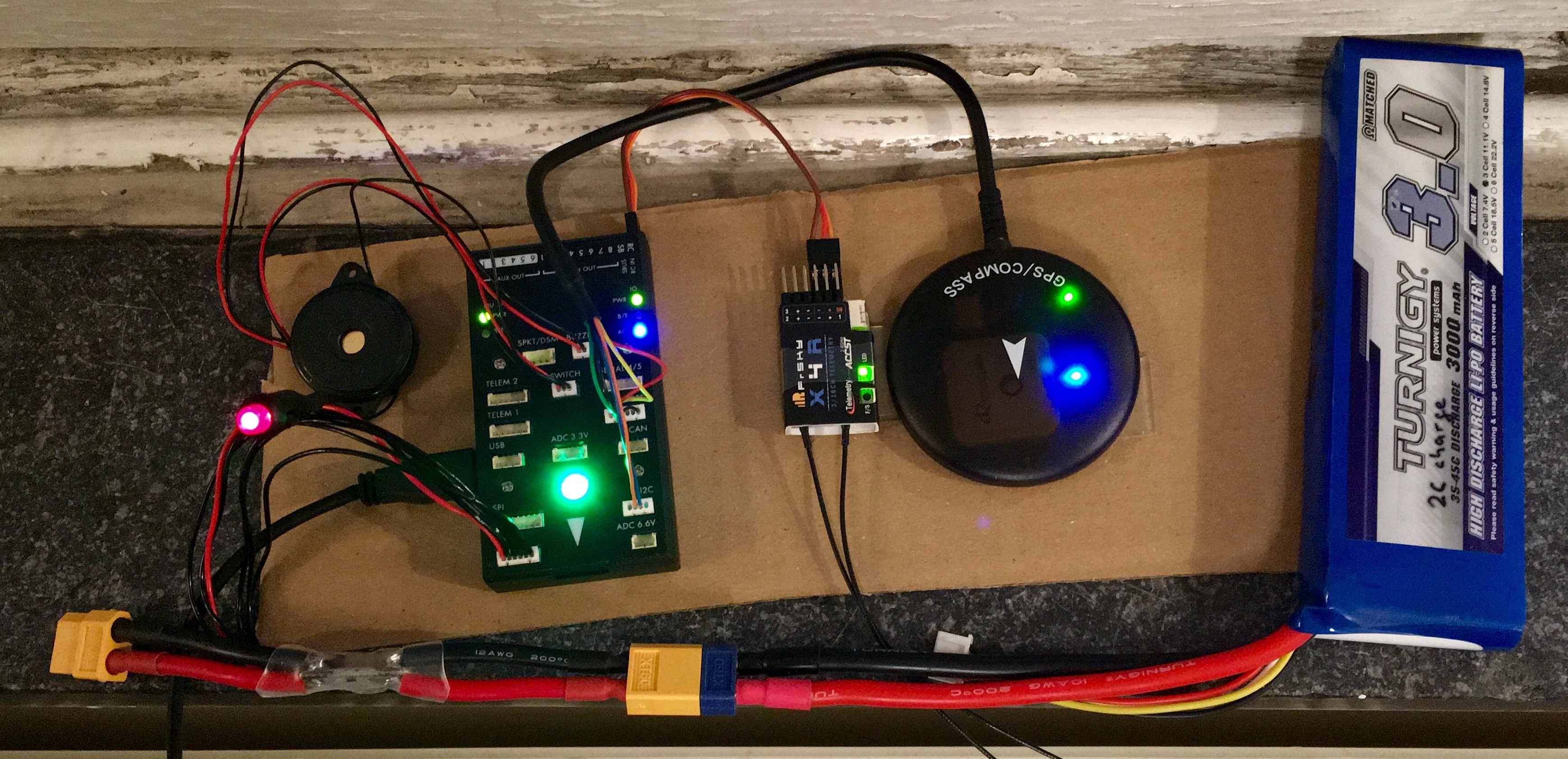
Alles anschließen
Der Pixhawk hat auf seiner Oberseite viele Anschlüsse für diverse Dinge: