Projekt Kamera-Hex Teil 3: Der Pixhawk Flight Controller
Da der Pixhawk Autopilot (Flight Controller Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn...) Open Source-Hardware und -Software ist, gibt es eine Vielzahl an Stellen im Netz, an denen sich Informationen, Downloads, Firmware und Anleitungen befinden. So gibt es z.B. nicht nur eine richtige Bodenstations-Software (engl. ground control station, gcs), sondern gleich drei mächtige Programme zur Auswahl. Mit ihnen lässt sich die Firmware des Pixhawk flashen, der Pixhawk wird mit ihnen programmiert, man kann vorgegebene Routen und Wegpunkte (waypoints) planen, die dann als Mission im Pixhawk gespeichert und nacheinander abgeflogen werden, es werden Telemetriedaten wie Akkuzustand, Lage des Kopters, Ort des Kopters etc. angezeigt.
Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn...) Open Source-Hardware und -Software ist, gibt es eine Vielzahl an Stellen im Netz, an denen sich Informationen, Downloads, Firmware und Anleitungen befinden. So gibt es z.B. nicht nur eine richtige Bodenstations-Software (engl. ground control station, gcs), sondern gleich drei mächtige Programme zur Auswahl. Mit ihnen lässt sich die Firmware des Pixhawk flashen, der Pixhawk wird mit ihnen programmiert, man kann vorgegebene Routen und Wegpunkte (waypoints) planen, die dann als Mission im Pixhawk gespeichert und nacheinander abgeflogen werden, es werden Telemetriedaten wie Akkuzustand, Lage des Kopters, Ort des Kopters etc. angezeigt.
| Programm | OS | Anmerkungen | Download |
|---|---|---|---|
| http://ardupilot.org/planner/index.html
Mission Planner |
Windows | Ältestes Programm, entwickelt für den ArduPilot, hat die meisten Funktionen. | http://ardupilot.com/wp-content/plugins/download-monitor/download.php?id=82 |
| http://qgroundcontrol.org
QGroundControl |
Windows, Macintosh (bald: Android, iOS!) | Innovative Oberfläche, hauptsächlich für den Pixhawk entwickelt. Treibende Kraft ist die ETH Zürich. | https://github.com/mavlink/qgroundcontrol/releases/ |
| http://ardupilot.org/planner2/index.html
APM Planner 2 |
Windows, Macintosh, Debian, Ubuntu, Raspberry Pi | Baut auf Mission Planner und qGroundControl auf. | http://ardupilot.com/downloads/?category=35#apm_planner_20_9_laquonbspdownloads |
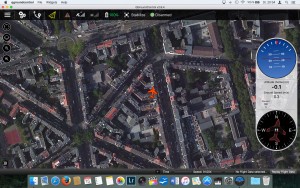
Und so sehen die Programme dann tatsächlich aus: Wie man sieht, ähneln sich Mission Planner und APM Planner 2 sehr, wohingegen QGroundControl ein etwas minimaoistischeres Design verfolgt. Auf einem kleinen China-Tablet mit Windows 10 und einem Touch-Screen merkt man schnell, dass die etwas größeren Symbole und überhaupt das ganze User Interface von QGroundControl sehr gut auf die Bedienung mit einem Finger anstatt einer Maus optimiert wurden.


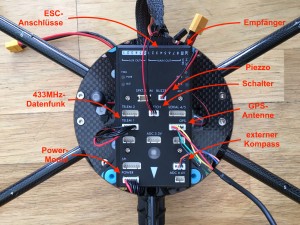
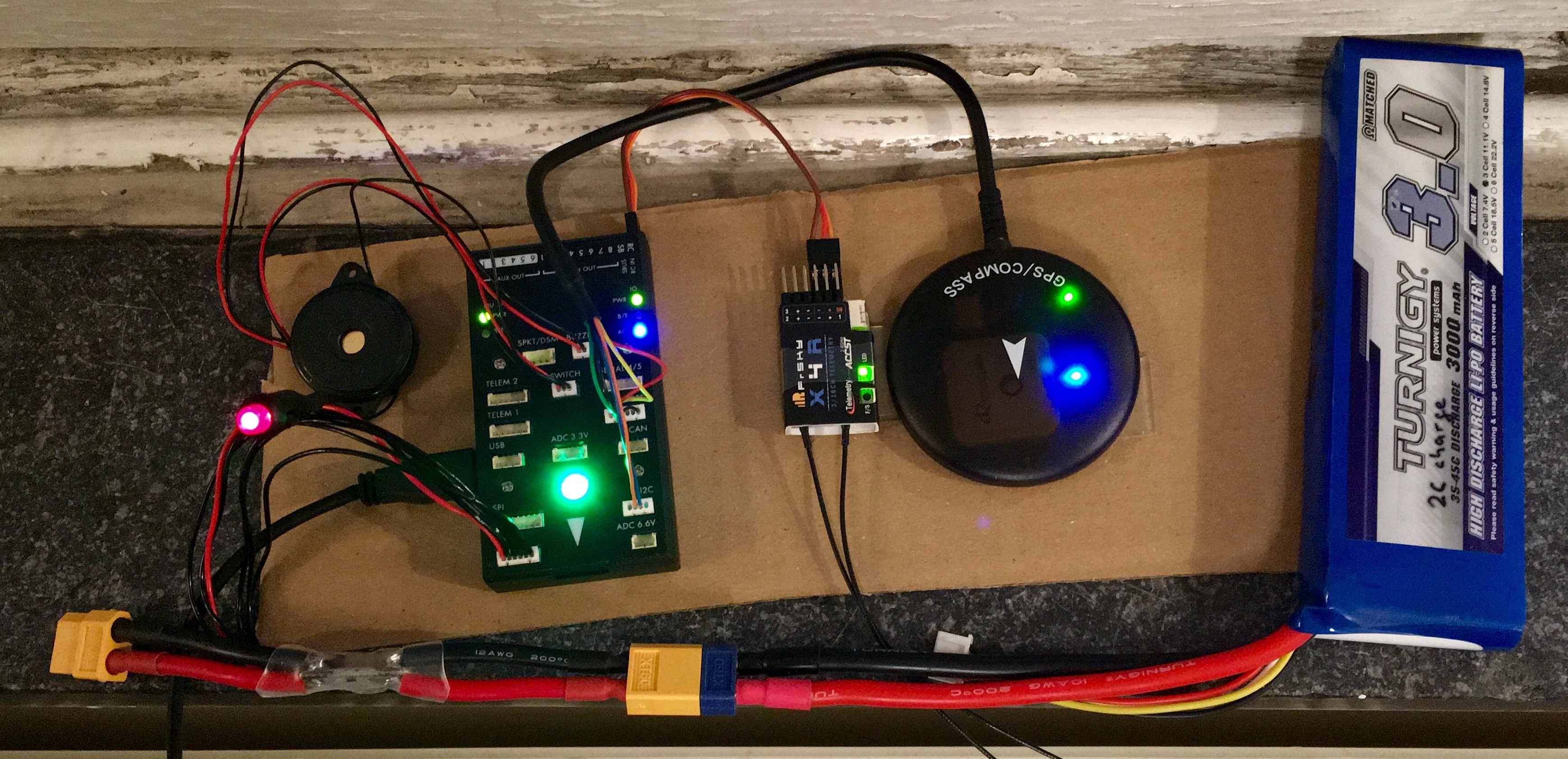
Alles anschließen
Der Pixhawk hat auf seiner Oberseite viele Anschlüsse für diverse Dinge: