Projekt Kamera-Hex Teil 3: Der Pixhawk Flight Controller
Da der Pixhawk Autopilot (Flight Controller) Open Source-Hardware und -Software ist, gibt es eine Vielzahl an Stellen im Netz, an denen sich Informationen, Downloads, Firmware und Anleitungen befinden. So gibt es z.B. nicht nur eine richtige Bodenstations-Software (engl. ground control station, gcs), sondern gleich drei mächtige Programme zur Auswahl. Mit ihnen lässt sich die Firmware des Pixhawk flashen, der Pixhawk wird mit ihnen programmiert, man kann vorgegebene Routen und Wegpunkte (waypoints) planen, die dann als Mission im Pixhawk gespeichert und nacheinander abgeflogen werden, es werden Telemetriedaten wie Akkuzustand, Lage des Kopters, Ort des Kopters etc. angezeigt.
Programm
OS
Anmerkungen
Download
http://ardupilot.org/planner/index.html
Mission Planner
Windows
Ältestes Programm, entwickelt für den ArduPilot, hat die meisten Funktionen.
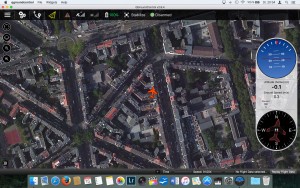
Und so sehen die Programme dann tatsächlich aus: Wie man sieht, ähneln sich Mission Planner und APM Planner 2 sehr, wohingegen QGroundControl ein etwas minimaoistischeres Design verfolgt. Auf einem kleinen China-Tablet mit Windows 10 und einem Touch-Screen merkt man schnell, dass die etwas größeren Symbole und überhaupt das ganze User Interface von QGroundControl sehr gut auf die Bedienung mit einem Finger anstatt einer Maus optimiert wurden.
Mission Planner in Windows 10
QGroundControl in Mac OS X 10.11 ElCapitan
APM Planner 2
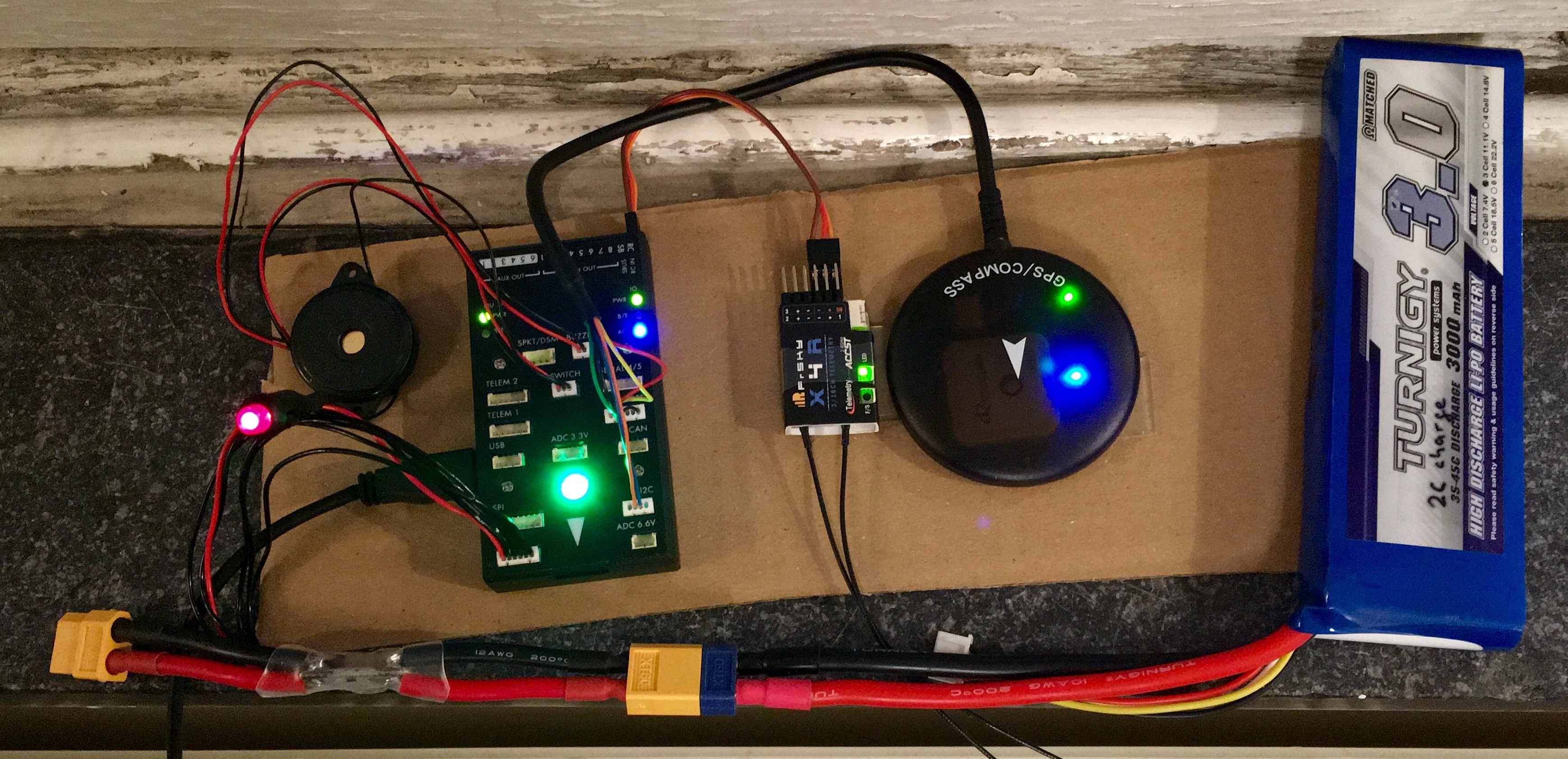
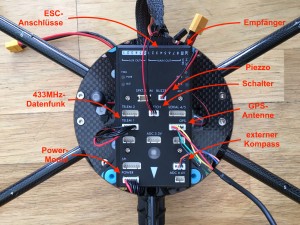
Alles anschließen
Der Pixhawk hat auf seiner Oberseite viele Anschlüsse für diverse Dinge:
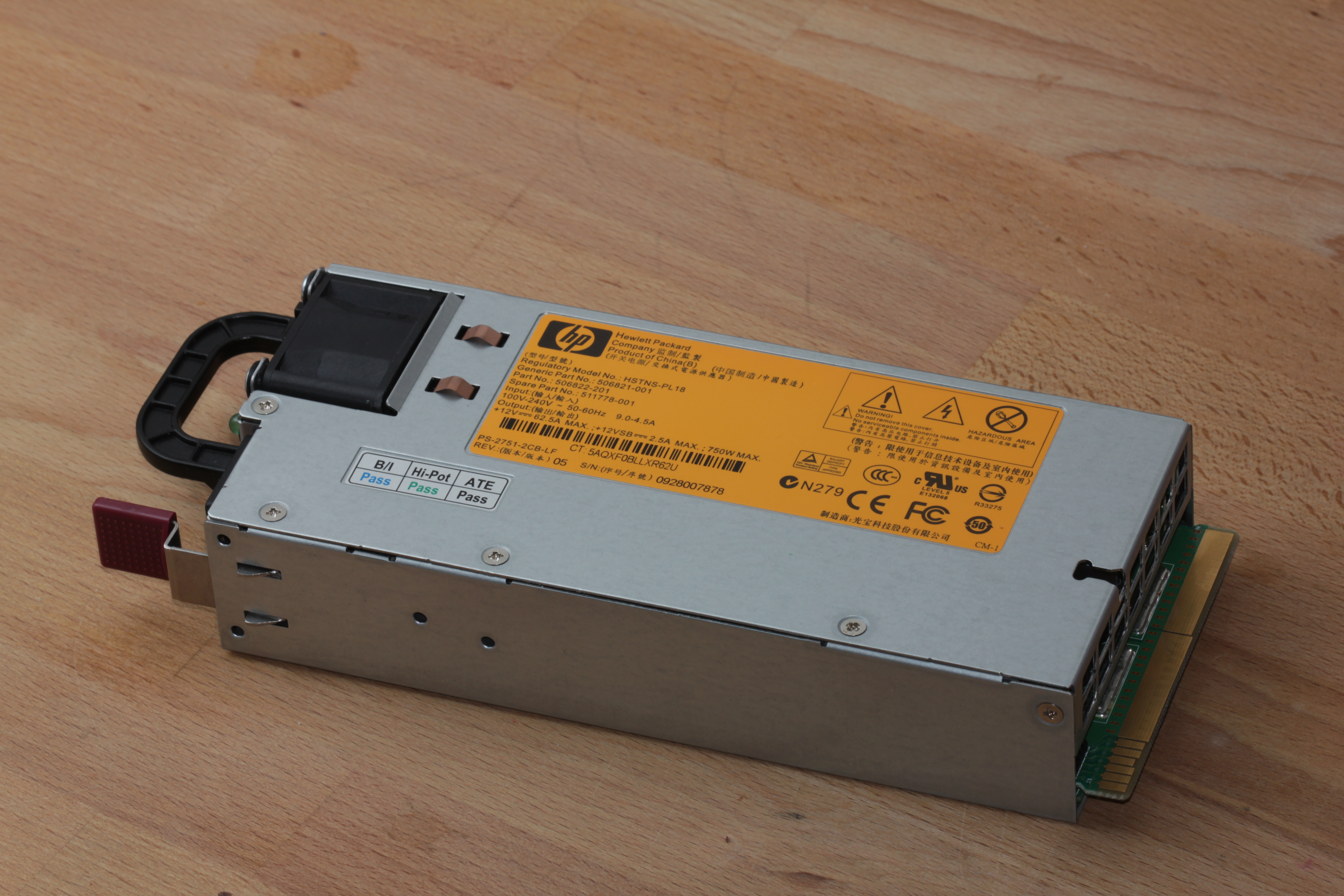
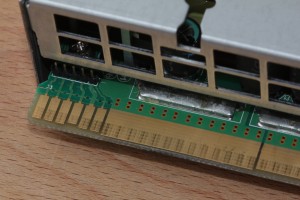
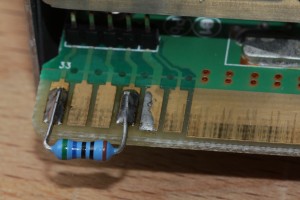
Auf meiner Arbeit steht ein Kontainer mit Elektroschrott. An dem darf ich mich bedienen. Neulich lag dort ein ausgemusterter Server drin. Seit einiger Zeit bin ich auf der Suche nach einem 12 Volt Netzteil um meine Akkus auch zu Hause aufladen zu können und nicht nur im Auto. Ich hatte Glück. Im Server stecken zwei Netzteile. Anders als bei den normalen Computernetzteilen sind es reine 12 Volt Netzteile und sie haben keine Kabel dran. Klein wie drei Tafeln Schokolade. Die Leistungsdaten klangen auch sehr verlockend: 62.5 Ampère. Über 60A! Krass viel. Aber die Netzteile „merken“, ob sie im Server stecken oder nicht. Und wenn sie nicht im Server sind, gehen sie auch nicht an. Im Internet fand ich dann den Hinweis, dass man eine Brücke auflöten muss, um dem Netzteil vorzugaukeln, dass es in einem Server steckt und nicht nackt auf dem Tisch liegt. Unter der Typenbezeichnung meines Netzteils fand ich im Netz nichts genaues. Dann benutzte ich die Bildersuche, und da fanden sich Bilder von anderen gehackten Netzteilen, die zwar nicht genau identisch mit meinem waren, aber scheinbar den selben Anschluss hatten.
Es wurde vorgeschlagen, einen 500 Ohm / 1 Watt Widerstand einzulöten. Ich hatte aber nur einen 2,2 KOhm / 1 Watt Wiederstand zur Hand. Der hat nicht zum gewünschten Erfolg geführt. Ich hab dann einfach einen 1/4 Watt Wiederstand mit ca. 500 Ohm genommen und siehe da: Klappt.
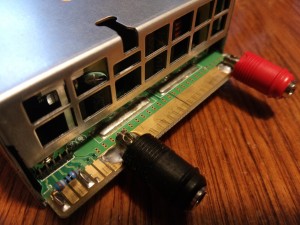
Was jetzt noch gelöst werden muss, ist die Frage: Wie bekomme ich da schöne Anschlüsse dran, die ich mit meinem Ladegerät verbinden kann.
Das Servernetzteil
Anschlussleiste
Widerstand eingelötet
Ich hab mich dann für 4mm Bananensteckerbuchsen entschieden…
Das wichtigste zuerst: Nicht nachmachen! Nicht, weil es gefährlich wäre, nee: es funktioniert nicht gut. Aber jetzt mal der Reihe nach. Alles hat angefangen mit dem H8 mini. Den gibt es von JJRC und von Eachine. Der fliegt einfach super, und anders als meine JJRC H20s gehen die H8 Minis einfach nicht kaputt. Schnelles und agiles Fliegen ist kein Problem. Vielleicht nix für Anfänger, aber für den geringen Preis kann eigentlich niemand etwas falsch machen. Den ersten habe ich für 13€ gekauft. Zwischenzeitlich war der Preis auch mal bei gut 11€.
In der nächsten Zeit werde ich noch Berichte darüber schreiben, wie ich eine andere Firmware auf einen H8 mini gemacht habe und wie man die Fünf- oder Sechsfach-Ladegeräte so umlöten kann, dass die Akkus auch mehr als 20 Ladungen überleben.
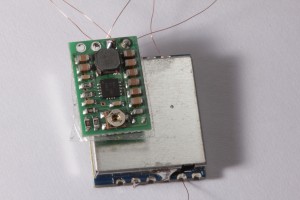
Nach vielen Flugstunden mit diesem genialen Copter kam dann die Idee auf, ob es nicht möglich wäre, ne Kamera und n Videosender mitfliegen zu lassen. Der H8 mini kann mit Ach und Krach 8 Gramm tragen. Nicht viel. Gekauft habe ich das:
Kamera (egal, was irgend wo steht: Achtung: 5 Volt, NICHT MEHR):
[fancy_link link=“http://www.banggood.com/600TVL-8_0MP-14-2_8mm-CMOS-FPV-170-Degree-Wide-Anlge-Lens-Camera-PALNTSC-p-984345.html“ target=“blank“]CMOS Minikamera[/fancy_link]
und dazu noch:
[fancy_link link=“http://www.reichelt.de/index.html?ACTION=3;ARTICLE=9613;SEARCH=KUPFER%200,1MM“ target=“blank“]Lackdraht 0,1 mm Dicke[/fancy_link]
Preis zusammen: etwas über 35€.
Über den Zusammenbau gibt’s nicht viel zu erzählen. Nur ein paar Anmerkungen:
Lackdraht:
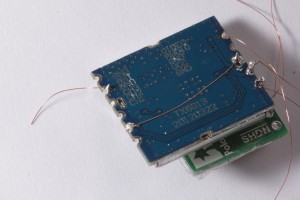
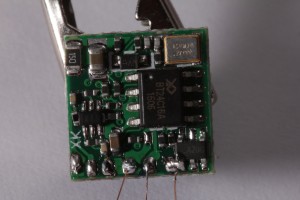
Das einzige, was man erwähnen sollte ist, wie man mit diesem Lackdraht umgeht. Dieser Draht ist mit einer isolierenden Lackschicht ummantelt. Diese muss natürlich weg, wenn man den Draht anlöten will. Am Anfang habe ich mit ca. 350 Grad gelötet, was oft dazu geführt hat, dass der Lack nicht verbrannt ist und der Draht nicht gehalten hat. Später bin ich dazu übergegangen, die Drahtenden mit 450 Grad zu verzinnen und dann, nachdem der Lack verbrannt ist, mit 350 Grad an die Platine zu löten. Das klappt gut. Wer sich Gedanken über den geringen Querschnitt macht: Die Bedenken hatte ich auch. Darum habe ich mal ausgerechnet wie hoch die Verlustleistung werden wird und wie hoch der Spannungsabfall. 11,3 mVolt und 1 mWatt. Also fast nix. Daten: Spannung 4,5 Volt, Strom 100 mA, Leitungslänge 10 cm.
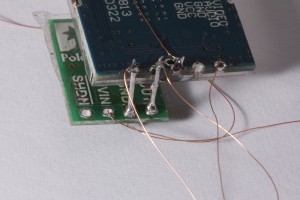
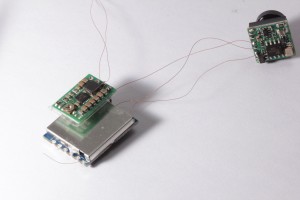
Spannungsversorgung:
Andere Leute haben schon das selbe versucht. Unter anderem habe ich dieses Video gesehen:
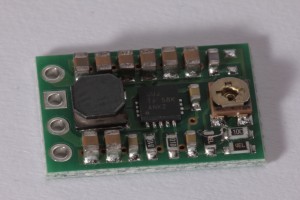
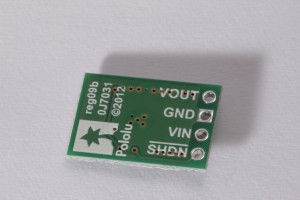
[fancy_link link=“https://www.youtube.com/watch?v=DREHnDY1WVk“ target=“blank“]Video von RC FPV Flight[/fancy_link] Sehr zu empfehlen! Dort kann man erfahren, dass die Spannung des H8 Minis im Flug so stark zusammenbricht, dass die Videoübertragung gestört wird. Um dem entgegenzuwirken braucht man eine Spannungsregelung für Kamera und Videosender. Das Pololu-Modul macht genau das in faszinierender Qualität und ist dabei noch sehr klein und leicht.
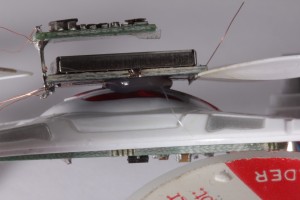
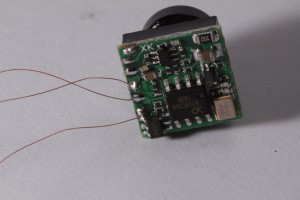
Antenne:
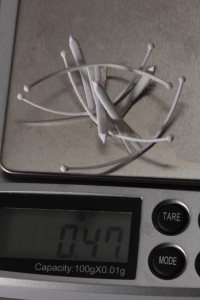
Als Antenne habe ich auch den Lackdraht verwendet. Die Länge entspricht Lambda/4, also ca. 13 mm. Ich komme damit auf eine Reichweite von deutlich über 100 Meter, was mir dicke reichen würde.
Bilder:
Das Mikrofon hab ich auch ausgelötet um Gewicht zu sparen. Hat sich kaum gelohnt…
Gesamtgewicht flugfertig 25,6 Gramm
Gesamtgewicht flugfertig ohne Akku 20,2 Gramm
Copter original ohne alles knapp 15 Gramm
Antenne
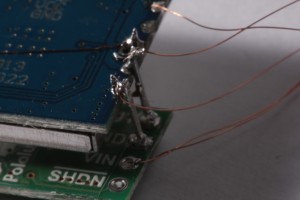
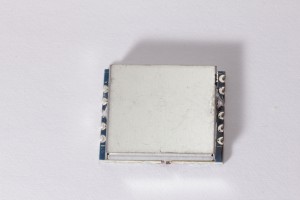
Sendekanal einstellen mit Dratbrücke
Gewicht sparen um jeden Preis
Ergebnis:
Ja, er fliegt. Aber mehr schlecht als recht. Man ist die ganze Zeit damit beschäftigt, das Ding irgendwie in der Luft zu halten. Schweben ist nur mit 90% Schub möglich. Es macht einfach überhaupt keinen Spaß. Ich habe mich dazu entschieden, den Sender und die Kamera auf einen größeren Copter zu bauen. Die Wahl fiel auf den Syma X5C-1. Dazu ein anderes mal mehr.
Copter.Cologne lässt Euch ab sofort Eure eigenen Fotos und Videos hochladen! Wer möchte, kann uns seine selbstgemachten Fotos und Videos geben, die wir dann auf dieser Seite und auf YouTube veröffentlichen können. Um das Hochladen zu ermöglichen, haben wir zwei Dienste eingerichtet, über die Ihr uns Eure Dateien schicken könnt:
Natürlich könnt Ihr Eure Filme und Fotos auch auf Euren eigenen YouTube-Account hochladen und dann einen Link bei uns ins Forum stellen!
[fancy_link link=“http://copter.cologne/forum/alles/user-videos/“]http://copter.cologne/forum/alles/user-videos/[/fancy_link]
Angucken:
Wir freuen uns schon auf Euren Input! Anschauen könnt Ihr all die Videos auf unserer neuen [fancy_link link=“http://copter.cologne/videos/“]Video-Seite[/fancy_link]
Am 13.3.2016 war Flugtag auf unserer Grünen Wiese (Siehe auch [fancy_link link=“http://copter.cologne/fliegen/“]unsere Flugseite[/fancy_link]). Unser User zerron112 hat das ganze mit seinem Copter gefilmt – viel Spaß beim Anschauen und hoffentlich bis bald auf unserem nächsten Flugtag oder [fancy_link link=“http://copter.cologne/stammtisch/“]Stammtisch[/fancy_link]!
Mein neuer Plan ist es, einen Hexacopter zu bauen. Das Projekt steht noch ganz am Anfang.
Er soll am Ende vor allem als Plattform für kleinere Kameras dienen. Deshalb werde ich versuchen, einen Antrieb zu bauen, der diese Nutzlast heben kann. Außerdem soll der Hexa ein Kamera-Gimbal bekommen. Deshalb wäre es praktisch, wenn der Flight Controller bereits Funktionen dafür hat. Ein leichter Rahmen ist angesagt.
Um die Übersicht zu behalten, gliedere ich dieses Projekt in mehrere Teile:
Dies ist Teil 1.
Teil 2 beschreibt nun den Bau des eigentlichen Hexacopters, ohne aber ein Gimbal und eine Kamera zu montieren.
Teil 3 wird sich mit dem Pixhawk beschäftigen. Was wird wo angeschlossen? Wie wird er programmiert? Welche (Bodenstations-)Software gibt es? 433MHz-MAVLink-Funk, Flight Modes, die Fernsteuerung etc. werden eingestellt.
In Teil 4 soll bewiesen werden, dass der Hex tatsächlich fliegt. Der Autopilot soll besser kennengelernt werden. Es soll getestet werden, wieviel Nutzlast getragen werden kann und ob die Berechnungen con Ecalc stimmten.
In den folgenden Teilen soll dann beschrieben werden, wie und welches Gibal montiert wird, wie die Kamera befestigt wird etc.
Der Rahmen ist das einzige Teil, das ich bereits habe. Es ist der Hobbyking Talon 625 aus Carbon und Alu.
Talon 650 Hex
Bausatz
Nachdem ich einen Tag damit verbracht habe, verschiedene Antriebs-Komponenten in Erwägung zu ziehen und vor allem die Kombinationen mit dem Online-Rechner für Flugmodelle ecalc.ch durchzurechnen, habe ich auch bereits einige Teile bestellt:
Nach den bekannten Ohm’schen Gesetzen steigt der Verlust durch Widerstand in elektrischen Leitungen mit dem Strom quadratisch an, mit der Spannung steigt er nur linear an. Deshalb gibt es vom Stromkraftwerk über Land Hochspannungsleitungen, der Strom wird erst kurz vor den Haushalten auf 230V herunter transformiert. So kann man dieselbe Leistung verschicken, ohne viel Verlust in Wärme zu stecken. (Siehe Wikipedia-Artikel über Hochspannungsleitungen)
Deshalb habe ich entschieden, dass der Antrieb mit 6S erfolgen soll.
Außerdem benutze ich die größten Propeller, die auf diese Plattform passen, 12″, mit einer Steigung von 5.5″.
All das führt dazu, dass die ESCs zwar tauglich für 6S sein müssen, aber nur 20A aushalten müssen. Wie man sieht, orientieren sich meine Zahlen und Komponenten stark an dem 6S Upgrade Kit für Hexakopter, das es von DJI zu kaufen gibt. Damit dürfte es ziemlich effizient sein, denn dafür ist DJI unter anderem ja bekannt.
Berechnungen
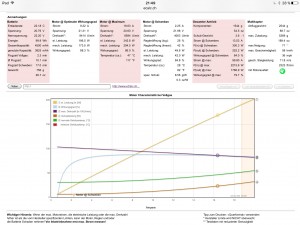
Ausgehend von den Daten des Antriebssets von DJI habe ich die obigen Komponenten in den Rechner bei Ecalc eingegeben. Hohe Spannung heißt niedrige kV-Zahl für die Motoren. Die größten Propeller, die auf den 625er Rahmen passen, sind 12″ groß. Bei kräftigen Motoren darf man ruhig mal eine hohe Steigung von 5,5″ bei den Props wählen. Die Werte, die hier errechnet wurden, stimmen mich optimistisch:
Ein Motor beim Schweben: 2,25A, 49,6W
Gesamter Antrieb beim Schweben: 13,53A, 300W
Strom maximal: 99,8A
Maximale Zuladung: 5,3kg! (Das wird später das Gimbal, die Kamera und das Ladegestell!)