
S bezeichnet die Anzahl an Zellen, die in einem LiPo-Akku seriell hintereinander geschaltet sind. Mit jeder Zelle steigt die Spannung des Akkupacks dabei um 3,7V. Ein 1S-Akku besteht demnach aus einer Zelle und hat die Spannung 3,7V, ein 2S-Akku aus zwei Zellen mit der Gesamtspannung 7,4V usw.
Archive: Glossary
BEC
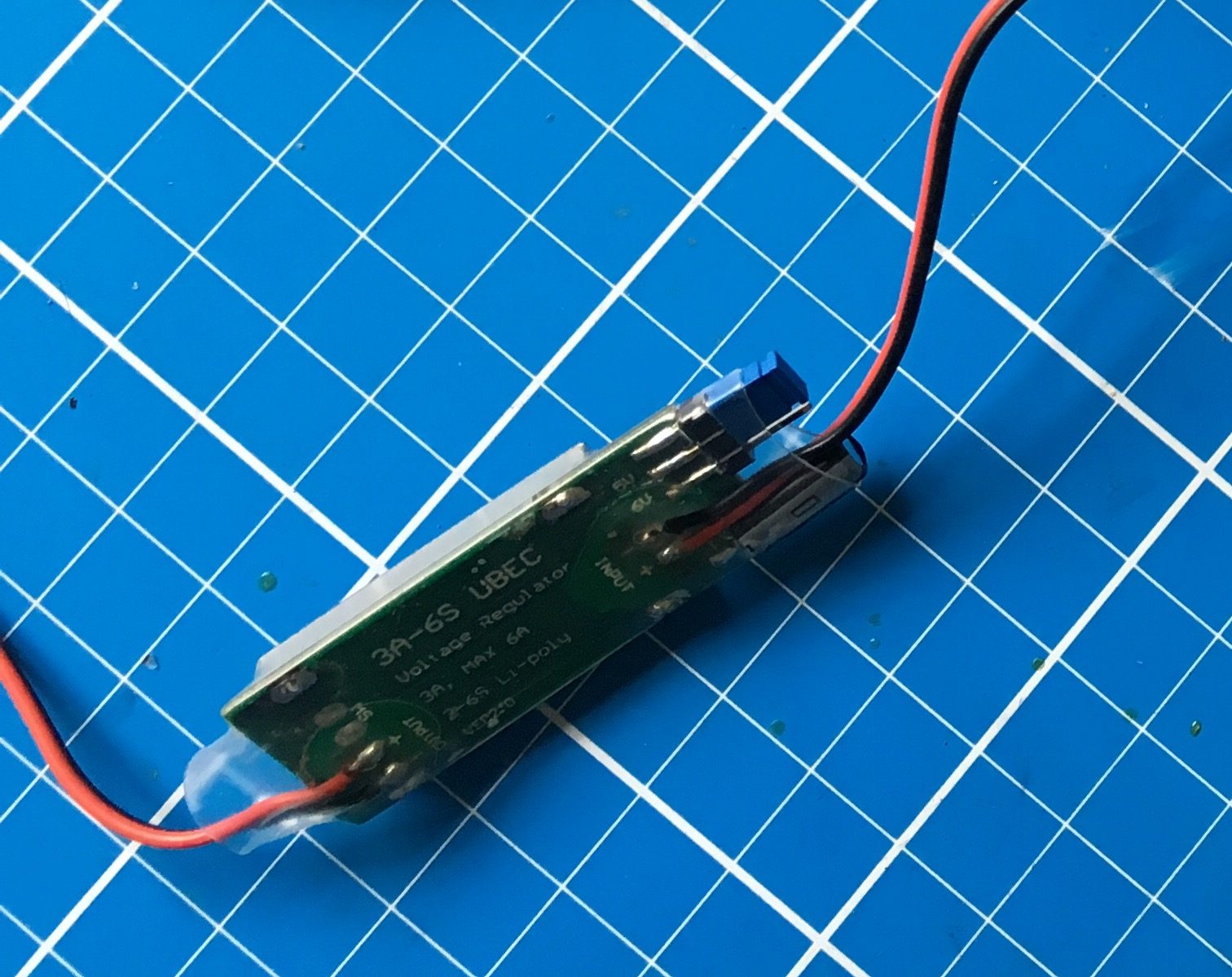
Battery Elimination Circuit. Elektronische Schaltung, die aus der relativ hohe Spannung von z.B. 3SS bezeichnet die Anzahl an Zellen, die in einem LiPo-Akku seriell hintereinander geschaltet sind. Mit jeder Zelle steigt die Spannung des Akkupacks dabei um 3,7V. Ein 1S-Akku besteht demnach aus einer Zelle und hat die Spannung 3,7V, ein 2S-Akku aus ... Akkus eine Spannung macht, die Komponenten wie ein FC Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... oder Servo benutzen können, meist 5V.
Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... oder Servo benutzen können, meist 5V.
Brushless
BürstenlosBürstenlos. Bauart von Elektromotoren. Es werden mehrere Spulen und Permanentmagnete verwendet, aber keine Drahtbürsten oder -kontakte, die die Spulen mit Strom versorgen. Stattdessen stehen die Spulen immer fest und die Magnete werden in Rotation .... Bauart von Elektromotoren. Es werden mehrere Spulen und Permanentmagnete verwendet, aber keine Drahtbürsten oder -kontakte, die die Spulen mit Strom versorgen. Stattdessen stehen die Spulen immer fest und die Magnete werden in Rotation versetz, indem die Spulen mittels spezieller Elektronik (ESC Electronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ...) in einem solchen Rhythmus angesteuert werden, dass sie die Magnete in Drehung versetzen. Eine sehr wichtige Angabe bei brushlessBürstenlos. Bauart von Elektromotoren. Es werden mehrere Spulen und Permanentmagnete verwendet, aber keine Drahtbürsten oder -kontakte, die die Spulen mit Strom versorgen. Stattdessen stehen die Spulen immer fest und die Magnete werden in Rotation ... Motoren ist die sog. kV ZahlUmdrehungen pro Minute pro Volt. Diese Kennzahl gibt bei bürstenlosen Brushless Motoren an, wieviele Umdrehungen pro Minute der Motor pro Volt erreicht, das ihm zugeführt wird. Hat ein Motor z.B. 1400kV und er wird mit einem 3S LiPo-Akku (entsprich..., die die Drehzal pro Volt angibt.
Electronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ...) in einem solchen Rhythmus angesteuert werden, dass sie die Magnete in Drehung versetzen. Eine sehr wichtige Angabe bei brushlessBürstenlos. Bauart von Elektromotoren. Es werden mehrere Spulen und Permanentmagnete verwendet, aber keine Drahtbürsten oder -kontakte, die die Spulen mit Strom versorgen. Stattdessen stehen die Spulen immer fest und die Magnete werden in Rotation ... Motoren ist die sog. kV ZahlUmdrehungen pro Minute pro Volt. Diese Kennzahl gibt bei bürstenlosen Brushless Motoren an, wieviele Umdrehungen pro Minute der Motor pro Volt erreicht, das ihm zugeführt wird. Hat ein Motor z.B. 1400kV und er wird mit einem 3S LiPo-Akku (entsprich..., die die Drehzal pro Volt angibt.
CCPM
Cyclic/collective pitch mixing. Bei Ferngesteuerten Helikoptern die Methode, die Hauptrotorblätter anzusteuern. Nicht zu verwechseln mit CPPM Combined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM!!
Combined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM!!
Siehe auch Wikipedia-Artikel (englisch).
CPPM
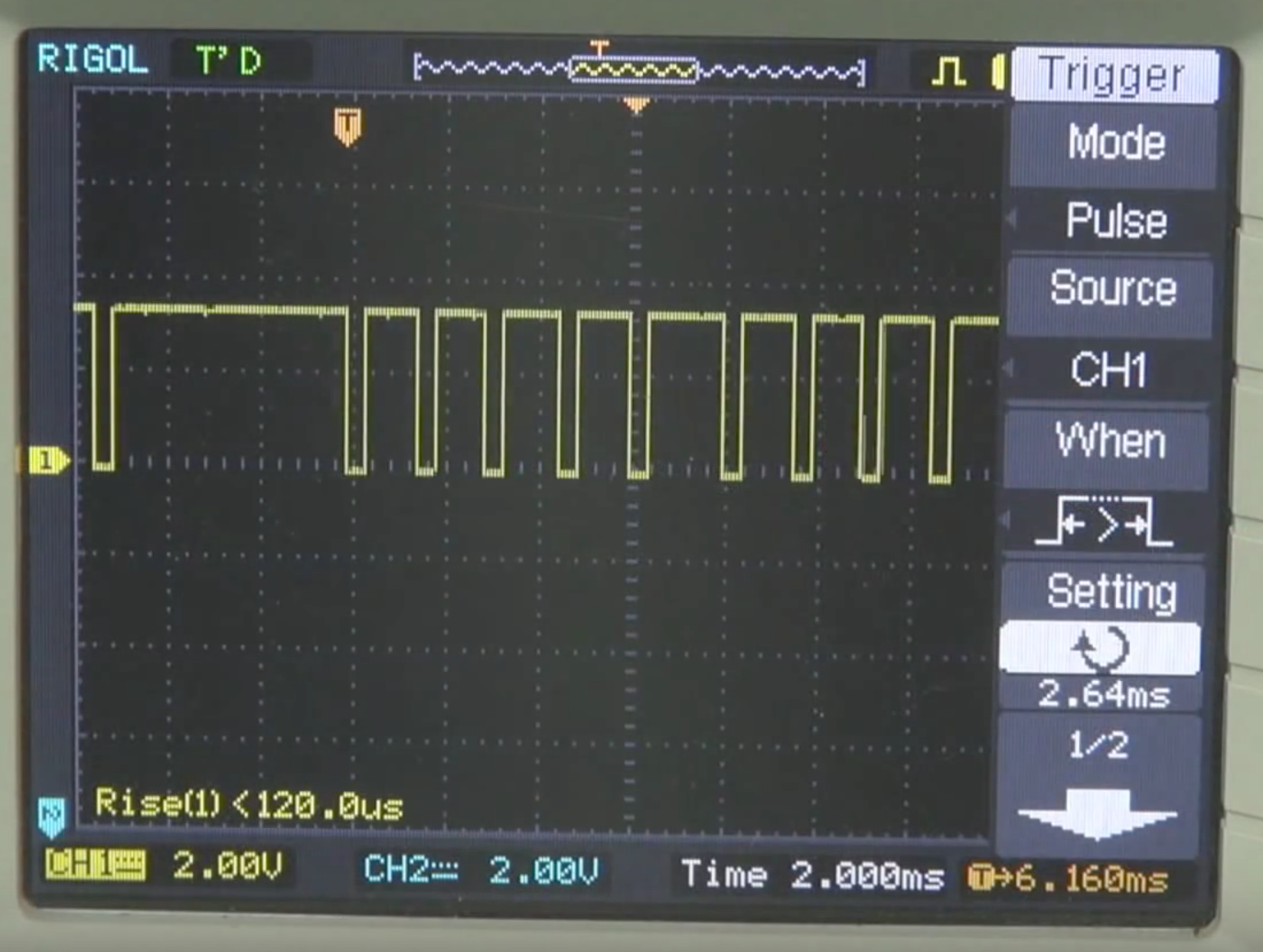
Combined Pulse Position Modulation. Eine Methode, um die PPMPuls Position Modulation. Methode zur Übertragung von Steuerbefehlen vom Empfänger zu einem Servo oder ESC. Die Steuerbefehle werden durch einen einzigen Elektrischen Impuls in der Signalleitung dargestellt. Die zeitliche Länge dieses Pulses varii... Befehle vom Empfänger Receiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... für mehrere Servos nacheinander durch ein einziges Kabel zu senden.
Receiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... für mehrere Servos nacheinander durch ein einziges Kabel zu senden.
Alternative digitale Methoden sind z.B. S.BUSEine Methode, Befehle vom Empfänger zu anderen Komponenten wie z.B. Servos zu Übertragen. Die Daten werden seriell übertragen. Das Protokoll stammt vom Hersteller Futaba, wird aber auch von anderen Firmen verwendet. Die bekannteste Alternative zu ...
Nicht zu verwechseln mit CCPMCyclic/collective pitch mixing. Bei Ferngesteuerten Helikoptern die Methode, die Hauptrotorblätter anzusteuern. Nicht zu verwechseln mit CPPM! Siehe auch Wikipedia-Artikel (englisch).!
ESC
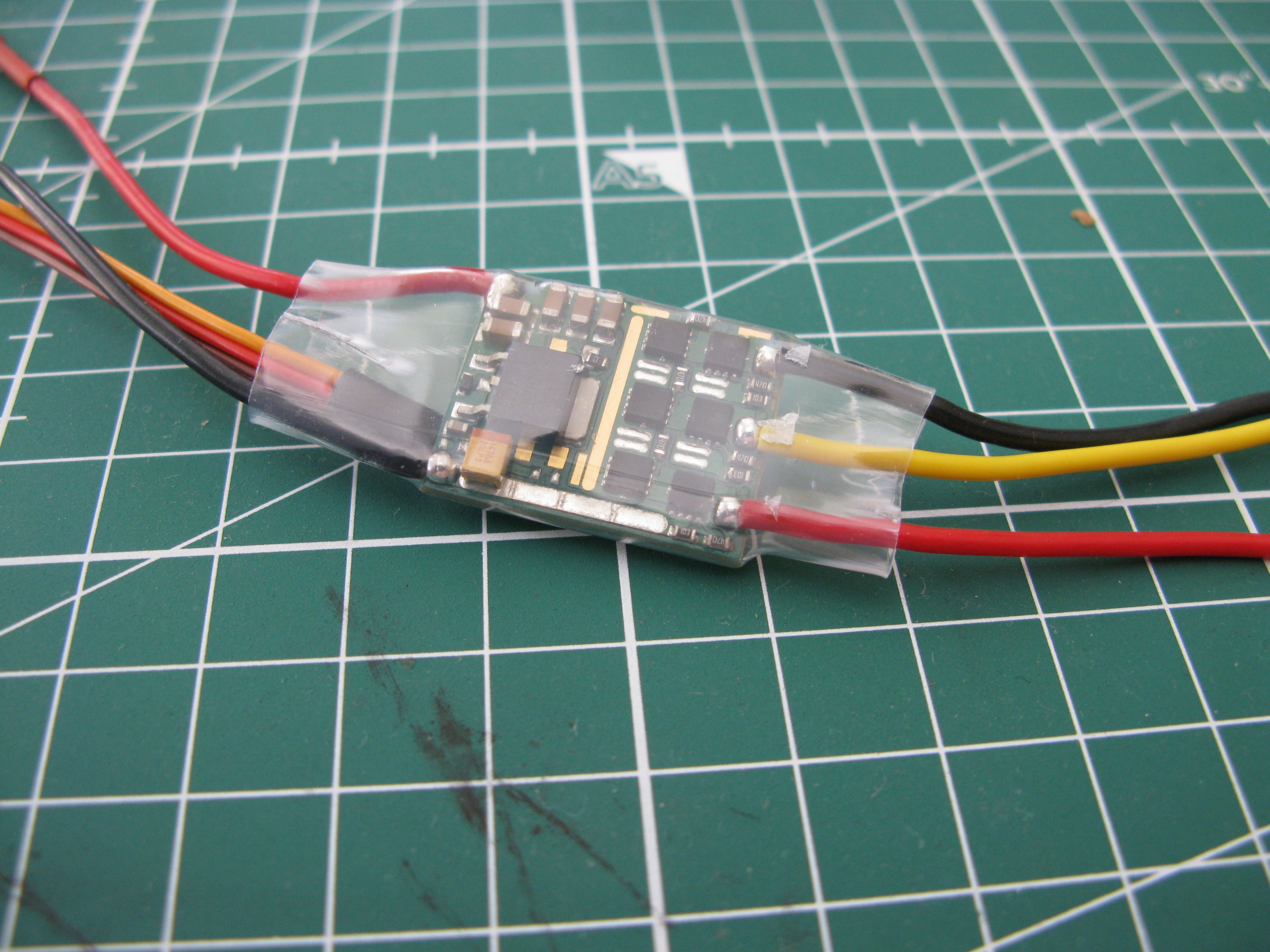
Electronic Speed Controller, Fahrtenregler
Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi...), ein Stromkabel mit + und – (zur Hauptbatterie/Flugakku) und Leitungen zum Motor (bei Bürstenmotoren + und – oder bei bürstenlosen BrushlessBürstenlos. Bauart von Elektromotoren. Es werden mehrere Spulen und Permanentmagnete verwendet, aber keine Drahtbürsten oder -kontakte, die die Spulen mit Strom versorgen. Stattdessen stehen die Spulen immer fest und die Magnete werden in Rotation ... Motoren drei Kabel). Viele ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... haben einen eingebauten integrierten BEC Battery Elimination Circuit. Elektronische Schaltung, die aus der relativ hohe Spannung von z.B. 3S Akkus eine Spannung macht, die Komponenten wie ein FC oder Servo benutzen können, meist 5V., der durch das Servokabel, das zum EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... geht, den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... mit Strom versorgt.
Battery Elimination Circuit. Elektronische Schaltung, die aus der relativ hohe Spannung von z.B. 3S Akkus eine Spannung macht, die Komponenten wie ein FC oder Servo benutzen können, meist 5V., der durch das Servokabel, das zum EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... geht, den EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... mit Strom versorgt.
FC
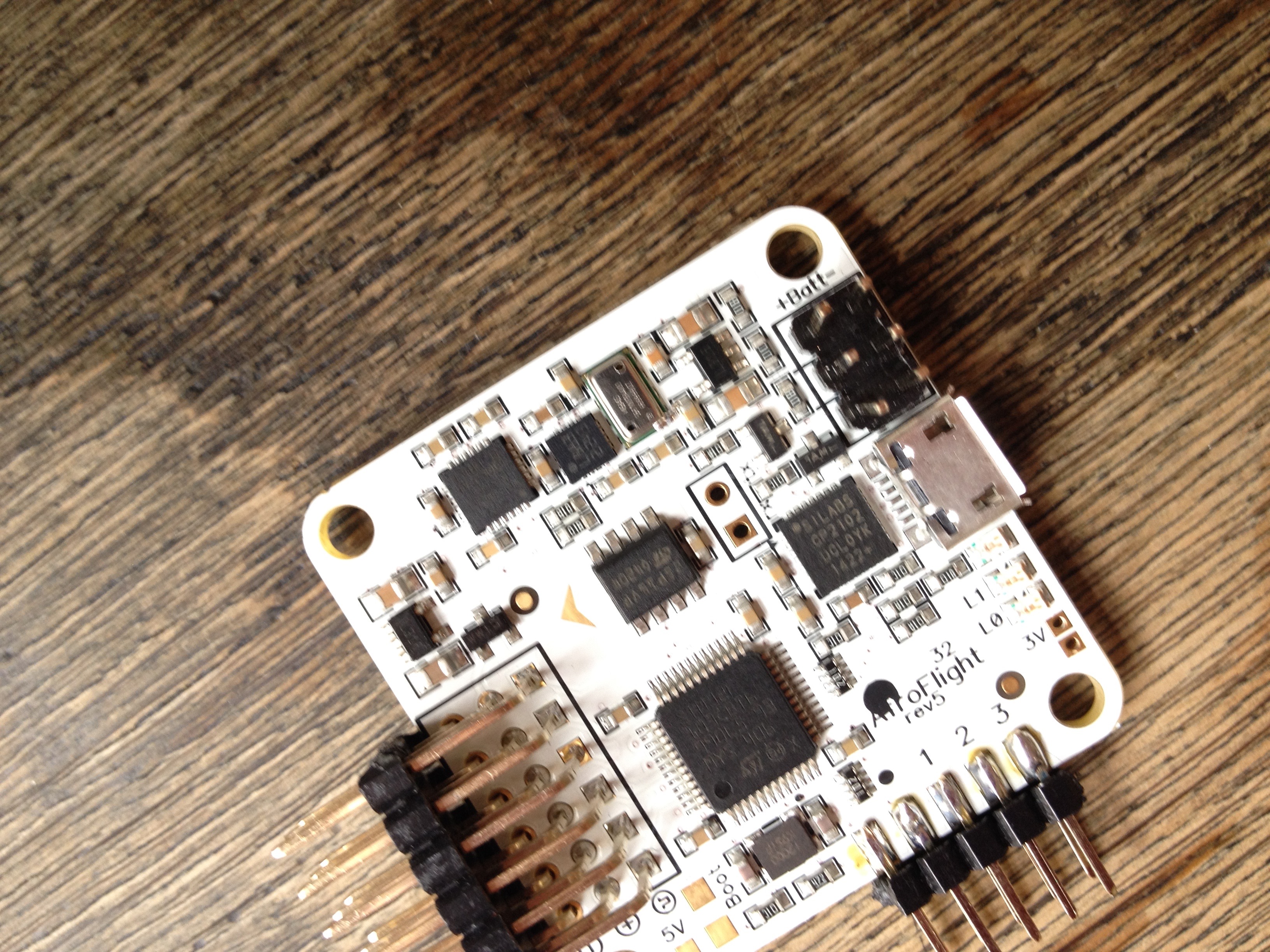
Flight ControllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn.... Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight ControllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen können und durch Steuerbefehle an die Servos und ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... korrigierend eingreifen, sobald die Ist-Lage von der Soll-Lage abweicht. Kompliziertere FCsFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... können auch die Position anhand von GPS-Daten bestimmen, vorherbestimmte Wegpunkte anfliegen und vieles mehr.

KK2 Flight ControllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn...

Pixhawk Flight ControllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... Anschlussdiagramm
flight mode
FlugzustandFlugzustand. Bei Coptern meist eine Einstellung des FC für eine bestimmte Situation wie Acro, stabilize, self level, etc. Bei Flächenmodellen meist voreingestellte Zustände der Klappen etc. für diverse Situationen wie das Starten, Landen, Gleiten... More.
Bei Coptern meist eine Einstellung des FCFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... für eine bestimmte Situation wie AcroFlugzustand. Bei Coptern meist eine Einstellung des FC für eine bestimmte Situation wie Acro, stabilize, self level, etc. Bei Flächenmodellen meist voreingestellte Zustände der Klappen etc. für diverse Situationen wie das Starten, Landen, Gleiten... More, stabilizeFlugzustand. Bei Coptern meist eine Einstellung des FC für eine bestimmte Situation wie Acro, stabilize, self level, etc. Bei Flächenmodellen meist voreingestellte Zustände der Klappen etc. für diverse Situationen wie das Starten, Landen, Gleiten... More, self levelFlugzustand. Bei Coptern meist eine Einstellung des FC für eine bestimmte Situation wie Acro, stabilize, self level, etc. Bei Flächenmodellen meist voreingestellte Zustände der Klappen etc. für diverse Situationen wie das Starten, Landen, Gleiten... More, etc.
Bei Flächenmodellen meist voreingestellte Zustände der Klappen etc. für diverse Situationen wie das Starten, Landen, Gleiten, etc.
FPV

First Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befestigte Kamera sieht. Diese sendet das Videobild mittels Echtzeit-Funk (in Deutschland meist auf Frequenzen um die 5,8GHz) zum EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... der Videobrille.

chinesischer Nano Quad mit FPV-Kamera

FPV First Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... Nano QX, Fatshark Dom HD2, Taranis.
First Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... Nano QX, Fatshark Dom HD2, Taranis.
Gimbal
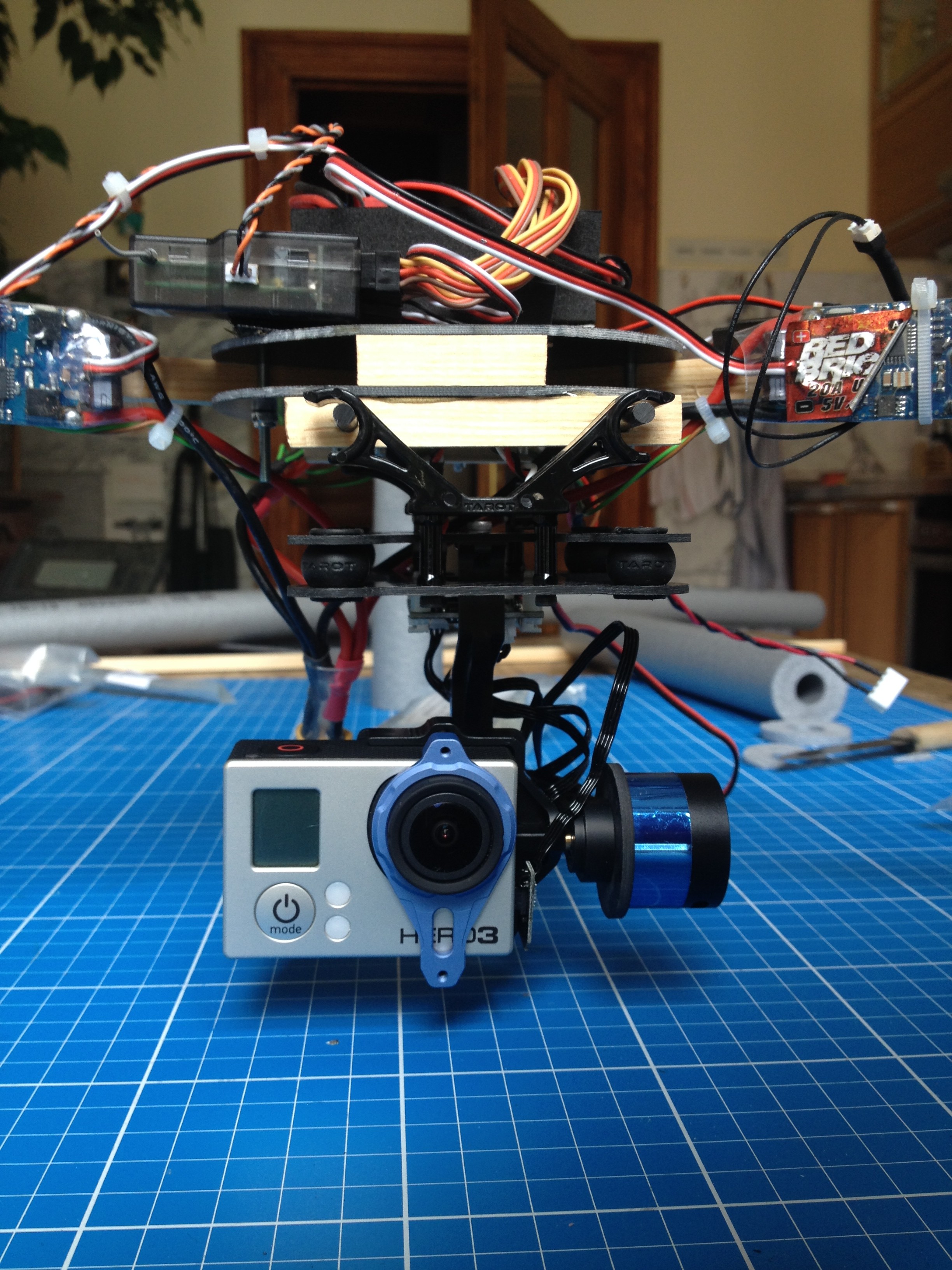
Eine Vorrichtung, um eine Kamera so an einem ferngesteuerten Flugmodell zu befestigen, dass die Kamera trotz der Bewegungen des Fluggeräts beim Flug ein absolut ruhiges Bild liefert. Dazu wird die Kamera in mindestens zwei Achsen, oft in drei Achsen frei beweglich aufgehängt. Ein mehrachsiger Lagesensor erkennt eine eventuelle Schräglage und steuert entsprechende Motoren, die die Aufhängung daraufhin so bewegen, dass die Kamera wieder gerade hängt. Der Vorgang passiert so schnell, dass die Kamera stillsteht. Die Motoren können Servos sein, bei hochwertigen Lösungen für filmische Zwecke werden aber meist brushlessBürstenlos. Bauart von Elektromotoren. Es werden mehrere Spulen und Permanentmagnete verwendet, aber keine Drahtbürsten oder -kontakte, die die Spulen mit Strom versorgen. Stattdessen stehen die Spulen immer fest und die Magnete werden in Rotation ... Motoren verwendet. Die Lagesensoren und die Steuereinheit können von manchem flight controllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... übernommen werden. Meistens sind es aber eigene Module.