Das wichtigste zuerst: Nicht nachmachen! Nicht, weil es gefährlich wäre, nee: es funktioniert nicht gut. Aber jetzt mal der Reihe nach. Alles hat angefangen mit dem H8 mini. Den gibt es von JJRC und von Eachine. Der fliegt einfach super, und anders als meine JJRC H20s gehen die H8 Minis einfach nicht kaputt. Schnelles und agiles Fliegen ist kein Problem. Vielleicht nix für Anfänger, aber für den geringen Preis kann eigentlich niemand etwas falsch machen. Den ersten habe ich für 13€ gekauft. Zwischenzeitlich war der Preis auch mal bei gut 11€.
In der nächsten Zeit werde ich noch Berichte darüber schreiben, wie ich eine andere Firmware auf einen H8 mini gemacht habe und wie man die Fünf- oder Sechsfach-Ladegeräte so umlöten kann, dass die Akkus auch mehr als 20 Ladungen überleben.
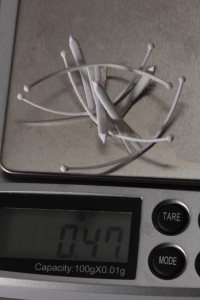
Nach vielen Flugstunden mit diesem genialen Copter kam dann die Idee auf, ob es nicht möglich wäre, ne Kamera und n Videosender mitfliegen zu lassen. Der H8 mini kann mit Ach und Krach 8 Gramm tragen. Nicht viel. Gekauft habe ich das:
- Copter:
[fancy_link link=“http://www.banggood.com/Eachine-H8-Mini-Headless-Mode-2_4G-4CH-6-Axis-RC-Quadcopter-RTF-p-975808.html“ target=“blank“]Eachine H8 mini[/fancy_link] - Kamera (egal, was irgend wo steht: Achtung: 5 Volt, NICHT MEHR):
[fancy_link link=“http://www.banggood.com/600TVL-8_0MP-14-2_8mm-CMOS-FPV-170-Degree-Wide-Anlge-Lens-Camera-PALNTSC-p-984345.html“ target=“blank“]CMOS Minikamera[/fancy_link] - Videosender:
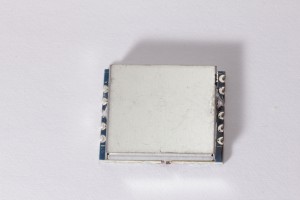
[fancy_link link=“http://www.banggood.com/FPV-5_8G-10mW-Wireless-Audio-Video-Transmitter-Module-TX5813-p-84761.html“ target=“blank“]10 mWatt 5,8 GHz[/fancy_link] - Spannungsversorgung:
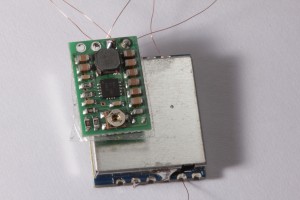
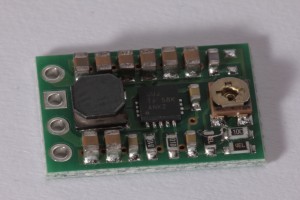
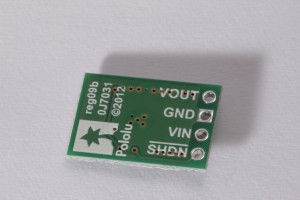
[fancy_link link=“http://www.exp-tech.de/shields-module/strom-spannung/pololu-einstellbarer-step-up-step-down-spannungsregler-s7v8a“ target=“blank“]Pololu Spannungsregler[/fancy_link] - und dazu noch:
[fancy_link link=“http://www.reichelt.de/index.html?ACTION=3;ARTICLE=9613;SEARCH=KUPFER%200,1MM“ target=“blank“]Lackdraht 0,1 mm Dicke[/fancy_link]
Preis zusammen: etwas über 35€.
Über den Zusammenbau gibt’s nicht viel zu erzählen. Nur ein paar Anmerkungen:
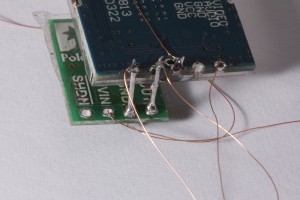
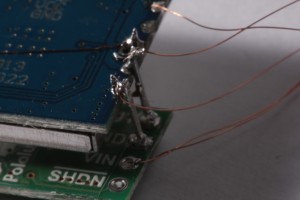
Lackdraht:
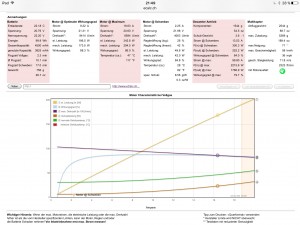
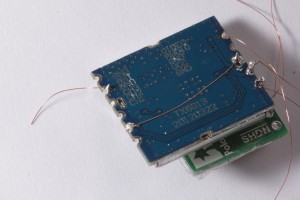
Das einzige, was man erwähnen sollte ist, wie man mit diesem Lackdraht umgeht. Dieser Draht ist mit einer isolierenden Lackschicht ummantelt. Diese muss natürlich weg, wenn man den Draht anlöten will. Am Anfang habe ich mit ca. 350 Grad gelötet, was oft dazu geführt hat, dass der Lack nicht verbrannt ist und der Draht nicht gehalten hat. Später bin ich dazu übergegangen, die Drahtenden mit 450 Grad zu verzinnen und dann, nachdem der Lack verbrannt ist, mit 350 Grad an die Platine zu löten. Das klappt gut. Wer sich Gedanken über den geringen Querschnitt macht: Die Bedenken hatte ich auch. Darum habe ich mal ausgerechnet wie hoch die Verlustleistung werden wird und wie hoch der Spannungsabfall. 11,3 mVolt und 1 mWatt. Also fast nix. Daten: Spannung 4,5 Volt, Strom 100 mA, Leitungslänge 10 cm.
Spannungsversorgung:
Andere Leute haben schon das selbe versucht. Unter anderem habe ich dieses Video gesehen:
[fancy_link link=“https://www.youtube.com/watch?v=DREHnDY1WVk“ target=“blank“]Video von RC FPV First Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... Flight[/fancy_link] Sehr zu empfehlen! Dort kann man erfahren, dass die Spannung des H8 Minis im Flug so stark zusammenbricht, dass die Videoübertragung gestört wird. Um dem entgegenzuwirken braucht man eine Spannungsregelung für Kamera und Videosender. Das Pololu-Modul macht genau das in faszinierender Qualität und ist dabei noch sehr klein und leicht.
First Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... Flight[/fancy_link] Sehr zu empfehlen! Dort kann man erfahren, dass die Spannung des H8 Minis im Flug so stark zusammenbricht, dass die Videoübertragung gestört wird. Um dem entgegenzuwirken braucht man eine Spannungsregelung für Kamera und Videosender. Das Pololu-Modul macht genau das in faszinierender Qualität und ist dabei noch sehr klein und leicht.
Antenne:
Als Antenne habe ich auch den Lackdraht verwendet. Die Länge entspricht Lambda/4, also ca. 13 mm. Ich komme damit auf eine Reichweite von deutlich über 100 Meter, was mir dicke reichen würde.
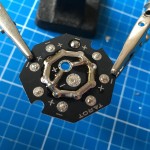
Bilder:









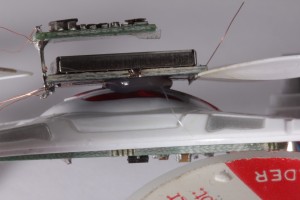
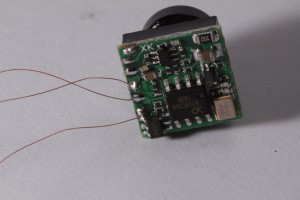
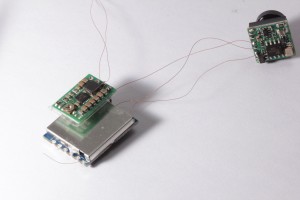
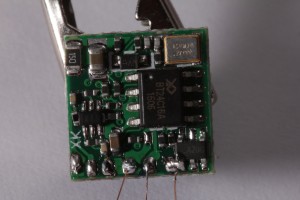







Ergebnis:
Ja, er fliegt. Aber mehr schlecht als recht. Man ist die ganze Zeit damit beschäftigt, das Ding irgendwie in der Luft zu halten. Schweben ist nur mit 90% Schub möglich. Es macht einfach überhaupt keinen Spaß. Ich habe mich dazu entschieden, den Sender und die Kamera auf einen größeren Copter zu bauen. Die Wahl fiel auf den Syma X5C-1. Dazu ein anderes mal mehr.