Am 13.3.2016 war Flugtag auf unserer Grünen Wiese (Siehe auch [fancy_link link=“http://copter.cologne/fliegen/“]unsere Flugseite[/fancy_link]). Unser User zerron112 hat das ganze mit seinem Copter gefilmt – viel Spaß beim Anschauen und hoffentlich bis bald auf unserem nächsten Flugtag oder [fancy_link link=“http://copter.cologne/stammtisch/“]Stammtisch[/fancy_link]!
Mein neustes liebstes Spielzeug momentan ist der FPVFirst Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... Nano QX von Blade. Kürzlich habe ich die BNF-Variante gekauft und benutze sie zusammen mit den Fatshark Dominator HD v2 Goggles und meiner Taranis. Absolute Empfehlung zum Erlernen des FPV-Fliegens. Man kann in Ruhe zu Hause üben, ist unabhängig von Wind und Wetter und kann auf einen zweiten Mann, den Spotter, verzichten.
Natürlich benutze ich zum Fliegen mein selbstgebautes DSMX-Modul ([fancy_link link=“http://copter.cologne/dsmx-modul-fuer-taranis-basteln/“]Bauanleitung[/fancy_link]) in der FrSky Taranis, welches ja bekanntermaßen [fancy_link link=“http://copter.cologne/dsmx-latenz-test/“]sehr gute Dienste[/fancy_link] leistet.
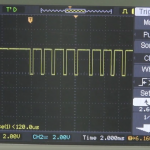
Heute habe ich einen kurzen Test gemacht, der die Latenz meines selbstgebauten DSMX-Moduls ([fancy_link link=“http://copter.cologne/dsmx-modul-fuer-taranis-basteln/“]meine Bauanleitung[/fancy_link]) für die Taranis darstellen sollte. Ich war sehr überrascht, wie gering die Verzögerung ist! Mit bloßen Augen ist kaum wahrzunehmen, dass zwischen dem Umlegen eines Schalters an der Fernsteuerung und der Reaktion des Modells darauf überhaupt Zeit vergeht.
In diesem Video sieht man sehr gut, welch geringe Latenz das selbstgebaute DSMX-Modul für die Taranis zusammen mit den Helis von Spektrum Blade hat. In der echten Welt ist die Verzögerung nicht zu erkennen. Lediglich in der Zeitlupe sieht man, dass es eine winzige Verzögerung zwischen dem Umlegen des Schalters und der Reaktion des Helis darauf gibt.
Um mit der Taranis auch Bind’n’Fly-Modelle von HorizonHobby fliegen zu können (z.B. die ganzen coolen Blade-Helikopter), kann man entweder das Orange Modul von Hobbyking kaufen und damit leben, dass man nur DSM2 benutzen kann. ODER man bastelt sich aus einer alten DX4e oder DX5 und einem leeren Modulgehäuse ein echtes DSMX-Modul selbst! Die Firmware der Taranis hat einen eigenen Menüpunkt dafür. Und das bedeutet, dass das selbstgebaute Modul nicht über den Umweg von CPPMCombined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! angesteuert wird, sondern die Taranis kommuniziert tatsächlich direkt in der Spektrum-Sprache mit dem HF-Chip. Das bedeutet geringere Latenz.
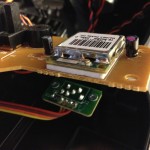
Bei diesem Projekt habe ich mich weitestgehend an der [fancy_link link=“http://johnprikkel.blogspot.de/2014/07/jr-dsmx.html“ variation=“teal“ target=“blank“]Anleitung von John Prikkel[/fancy_link] orientiert. Das schwierigste war es, das Original-HF-Modul aus der alten DX4e rauszulöten, ohne etwas zu zerstören. Nach geglückter Operation ist die DX4 übrigens weiter uneingeschränkt als Schüler-Funke nutzbar, denn der PPM-Output auf der Rückseite ich nicht beeinträchtigt.
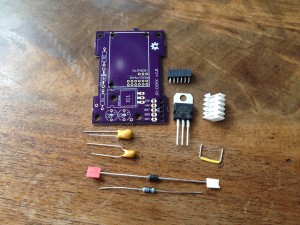
Diese Teile werden benötigt:
IC1 LD1117V33
R1 4.7K (5%, 1/2 Watt)
R2 Drahtbrücke
D1 1N4001
C1 1uF
C2 10uF
JP1 Molex 538-22-14-2054
JP2 Harwin M22-7140642
Gehäuse: [fancy_link link=“http://www.horizonhobby.com/products/integrated-case-for-jr-compatible-air-module-SPM6817″ variation=“teal“ target=“blank“]DM9-Leergehäuase von Spektrum[/fancy_link]
Dieser Einkaufskorb bei Mouser Elektronik Versand enthält die benötigten Teile:
[fancy_link link=“http://www.mouser.com/ProjectManager/ProjectDetail.aspx?AccessID=027ba40aa6″ variation=“teal“ target=“blank“]Mouser Projekt[/fancy_link]
Hier sind ein paar Fotos:
Dies sind die Teile, die benötigt werden:
In diesem Video kann man sehr gut sehen, wie gering die Latenz mit diesem Modul ist. In der Taranis eingesetzt zum Steuern eines Blade mCPX Helis ist in der echten Welt keinerlei Verzögerung zu sehen. Lediglich die Zeitlupe zeigt einen winzigen Unterschied:
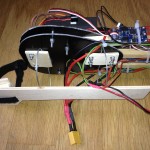
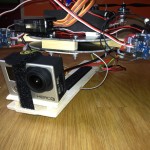
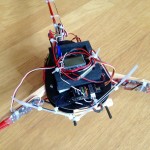
Nachdem Jochen und ich genügend YouTube-Videos von Flitetest gesehen haben, in denen David Windestal seinen Tricopter vorstellt, beschlossen wir, nach seiner [fancy_link link=“http://rcexplorer.se/projects/2011/09/the-tricopter-v2-5/“ variation=“teal“ target=“blank“]Anleitung[/fancy_link] selber einen zu bauen. An die Arme habe ich farbige LEDs angebracht. Der erste Aufbau hatte einen Spektrum 7-Kanal EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... AR7010 mit dem Telemetrie-Modul TM1000 für Volt und Temperatur. Später fügte ich ein Tarot T2D 2-Achs GoPro GimbalEine Vorrichtung, um eine Kamera so an einem ferngesteuerten Flugmodell zu befestigen, dass die Kamera trotz der Bewegungen des Fluggeräts beim Flug ein absolut ruhiges Bild liefert. Dazu wird die Kamera in mindestens zwei Achsen, oft in drei Achsen... hinzu. Dafür musste ich das Landegestell umbauen, damit der Copter nicht auf der Kamera landet. Das letzte Upgrade meines Tillcopter war der Umstieg auf das RC-System von FrSky (Taranis mit D4R-II). Natürlich muss nach einem Crash immer mal wieder ein Propeller oder Arm ausgetauscht werden. Hier sind ein paar Fotos von meinem Tillcopter I:
Servo-Mechanismus und Servo
drei fertige Arme
Vorbereiten der Motoren (Epoxy zum stabilisieren der Kabelaustritte)
Der Arbeitsplatz
Provisorische Grundplatten
KK2-Board Test
Drehrichtungen der Propeller
Original Batterie- und Kamera-Platte nach David Windestal