Heute habe ich meine FrSky Taranis X9D, die noch nicht die „Plus“-Variante ist, mit einem kleinen Modul für den Vibrationsalarm nachgerüstet. Das war zwar ein bisschen fummelig, aber mit ein bisschen Geschick und dieser Anleitung kriegt Ihr das auch hin! Es gibt dazu auch ein offizielles [fancy_link link=“http://www.frsky-rc.com/download/view.php?sort=&down=149&file=Taranis%20X9D%20Vibration%20Mount%20Guide“ target=“blank“]PDF von FrSky[/fancy_link] auf Englisch, das Ihr Euch angucken könnt oder [download_link link=“http://copter.cologne/wp-content/uploads/2016/03/Taranis-X9D-Vibration-component.pdf“]hier runterladen[/download_link] könnt.
Voraussetzungen
Diese Anleitung bezieht sich nur auf die Taranis X9D (ohne Plus) Version B! Ob Eure Taranis solch eine ist, könnt Ihr auf ihrer Rückseite erkennen:
Taranis Version B
Basteltisch
Ansonsten sind drei kleine Drähte nötig, Heißkleber, ein Lötkolben, Lötzinn und ein paar Werkzeuge wie kleine Zangen, Schraubenzieher etc.
Los geht’s!
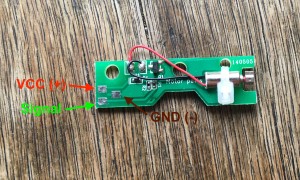
Das sog. Haptic-Modul besteht aus einem winzigen Motor auf einer Platine. Es braucht lediglich Strom (also + und –) und einen Draht für das Signal, wann er losgehen soll.
Das Haptic Modul zum Nachrüsten
Drähte dran
Als erstes lötet man genau diese Drähte an das kleine Bauteil. Am besten nimmt man verschiedene Farben. Und dann muss man natürlich die Fernsteuerung aufschrauben. Vor dem Öffnen des Senders sollte man immer die Batterie entnehmen. Das Gehäuse lässt sich leicht aufklappen und zwei der vielen Schalter fallen einem entgegen.
Batterie raus!
Schalter lösen!
Taranis aufklappen!
Die beiden Schalter, die immer rausfallen, habe ich mit Doppelklebeband festgemacht, damit sie nicht so nerven. Und schon sieht man recht gut, wo unser kleines Vibrations-Modul eingebaut werden soll:
Lockere Schalter…
…werden festgeklebt.
Rechts neben dem Sende-Board kommt der Motor hin.
Rechts neben der Platine des 2,4GHz-Senders sind zwei Schrauben, und genau dahin kommt unser Haptik-Modul. Dafür muss man diese Schrauben entfernen, ein bisschen Heißkleber auf die Platine geben und schnell das kleine Modul mit den Schrauben dort befestigen. Aufpassen, dass man nicht die dünnen Kabel des Motors selbst festschraubt!
Schrauben rausdrehen!
Hier kommt der Heißkleber drauf!
Dann das Modul draufdrücken…
sodass es auf die Löcher passt, …
…und dann wieder festschrauben!
Als nächstes werden die Kabel festgelötet. Die drei Stellen, an denen die Litzen später sein sollen, sind etwas haarig!
Die drei Lötpunkte
Um das Kabel für das Signal festzulegen, muss man eine der vielen Leiter aus dem Stecker ziehen. Das fällt leichter, wenn man ihn dafür kurz rauszieht. Und dann vorsichtig alles verlöten! VCC + kommt an die rechte Seite des winzigen Widerstands R10, GND– kommt an die rechte Seite von D5. Für das Signal-Kabel nicht vergessen, vorher ein winziges Stück Schrumpfschlaue über den Draht zu ziehen!
Stecker rausziehen!
Leiter rausziehen!
VCC+ sitzt!
GND– sitzt!
Signal-Kabel verbunden!
Lötstelle verschrumpfen!
Das fertige Werk sollte dann ungefähr so aussehen:
Fertig!
Nun kann man die Taranis vorsichtig wieder zusammensetzen und zuschrauben.
Software einstellen
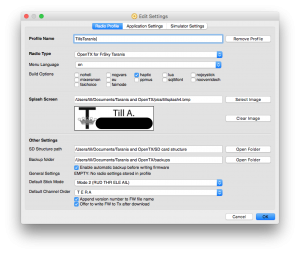
Damit der Vibrationsalarm auf wirklich funktioniert, muss man jetzt nur noch eine bestimmte Variante der Firmware auf der Taranis installieren, damit [fancy_link link=“http://www.open-tx.org/downloads“ target=“blank“]OpenTX[/fancy_link] auch weiß, dass man das Modul eingebaut hat. Das ist aber mit Hilfe der OpenTX-Software [fancy_link link=“http://www.open-tx.org/downloads“ target=“blank“]companion[/fancy_link] ganz einfach! In dem Programm müsst Ihr im Menü Einstellungen (das Zahnrad-Symbol) das kleine Häkchen setzen bei „haptic“, dann OK klicken und dann die Firmware neu aufspielen.
„haptic“ ankreuzen!
Das geht, indem Ihr an der Taranis den linken und rechten waagerechten Trimmschalter jeweils in Richtung An-/Ausschalter drückt und dann mit gedrückten Schaltern die Taranis einschaltet. So bootet sie in das Service-Menü. Jetzt könnt Ihr einfach einen USB-Stecker in Euren Rechner Stecken und auf der Rückseite mit dem USB-Port der Taranis verbinden. Sobald sich zwei Massenspeicher am Rechner zeigen, könnt Ihr companion verwenden, um die neue Firmware auf den Sender zu flashen. Dann werft Ihr die beiden Massenspeicher sicher aus, zieht das USB-Kabel ab und drückt auf der Taranis im Menü „Exit“. So startet sie und Ihr könnt Eure Haptik mittels einem langen Druck auf die Menu-Taste konfigurieren.
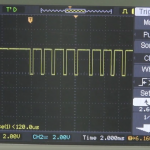
Heute habe ich einen kurzen Test gemacht, der die Latenz meines selbstgebauten DSMX-Moduls ([fancy_link link=“http://copter.cologne/dsmx-modul-fuer-taranis-basteln/“]meine Bauanleitung[/fancy_link]) für die Taranis darstellen sollte. Ich war sehr überrascht, wie gering die Verzögerung ist! Mit bloßen Augen ist kaum wahrzunehmen, dass zwischen dem Umlegen eines Schalters an der Fernsteuerung und der Reaktion des Modells darauf überhaupt Zeit vergeht.
In diesem Video sieht man sehr gut, welch geringe Latenz das selbstgebaute DSMX-Modul für die Taranis zusammen mit den Helis von Spektrum Blade hat. In der echten Welt ist die Verzögerung nicht zu erkennen. Lediglich in der Zeitlupe sieht man, dass es eine winzige Verzögerung zwischen dem Umlegen des Schalters und der Reaktion des Helis darauf gibt.
Passend zu der [fancy_link link=“http://copter.cologne/250er-racing-quad-selberbauen/“ variation=“teal“]Bauanleitung[/fancy_link] für einen Mini Racing FPVFirst Person View. Sicht aus der ersten Person. Bezeichnet im Modellbau heutzutage das Fliegen eines Modells, meist eines Quadrocopters oder Motorseglers, indem man durch eine Videobrille guckt und allein das Bild sieht, das eine auf dem Modell befes... Quadcopter will ich hier beschreiben, wie ich meine FrSky Taranis X9D (nicht-plus) dafür programmiert habe. In dem Miniquad ist der D4R-II und ein Naze32 Board eingebaut, meine Taranis verwendet die [fancy_link link=“http://www.open-tx.org/2015/05/04/opentx-2.0.17/“ variation=“teal“]OpenTX Version 2.0.17[/fancy_link] Firmware. Für die Sprachausgabe habe ich ein Sprachpaket heruntergeladen, das etwas mehr als die normalen Ansagen enthält: [fancy_link link=“http://openrcforums.com/forum/viewtopic.php?f=64&t=6871″ variation=“teal“]Voice Sound Pack Generator Mac OS X[/fancy_link]
Modell als .bin Datei für die SD-Karte der Taranis runterladen:
[download_link link=“http://copter.cologne/wp-content/uploads/2015/09/ZMR_250-2015-09-06.bin_.zip“ variation=“teal“]ZMR_250.bin[/download_link]
Folgende Funktionen habe ich programmiert:
Schalter SE: Flugmodi umschalten zwischen Self LevelFlugzustand. Bei Coptern meist eine Einstellung des FC für eine bestimmte Situation wie Acro, stabilize, self level, etc. Bei Flächenmodellen meist voreingestellte Zustände der Klappen etc. für diverse Situationen wie das Starten, Landen, Gleiten... More/Horizon/Acro
SA: Logs auf SD-Karte starten/stoppen
SB: aus/Barometer-Mode/Kompass-Mode
SC: nichts/LEDs aus/Piepser an
SF: Throttle Hold
SD: Hi Rates/Medium Rates und Expo/Low Rates und Expo
Warnung bei leerer Batterie
Sprachausgabe für obige Funktionen
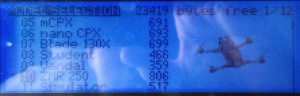
1/12: Model Selection
Hier wird der Modellspeicher angelegt und anschließend ausgewählt, indem man die Enter-Taste lange gedrückt hält.
1: Modell anlegen und auswählen
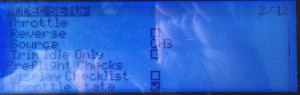
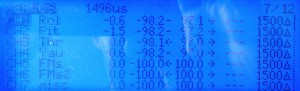
2/12: Model Setup
In diesem Screen werden verschiedene Einstellungen vorgenommen: Der Name wird vergeben, ein Bild ausgewählt, ein Timer eingerichtet, die Quelle für den Gashebel festgelegt (damit der Countdown funktioniert, wenn man ihn so einstellt, dass er beim Gasgehen losläuft), Alarme für Schalterstellungen festgelegt, das richtige HF-Modul (intern oder extern) ausgewählt und evtl. Trainerfunktionen eingestellt:
2: grundlegende Einstellungen
2: Throttle ist Kanal 3
2: Warnungen für bestimmte Schalter
2: Welches HF-Modul?
3/12: Heli Setup
Hier lässt man alles auf “ – – – “ .
4/12: Flight Modes
FM0 wir immer dann automatisch aktiv, wenn keiner der anderen Flight Modes aktiviert wurde. Deshalb benutze ich ihn nie. Für Throttle Cut benutze ich gerne den FM1, damit auch dieser Zustand auf dem Display angezeigt wird. Die anderen drei sind diejenigen, die ich persönlich bevorzuge:
4: Flight Modes
5/12: Inputs
In diesem Screen teilt man der Taranis mit, welche Knüppel wie heißen und man kann sie hier auch mit „Dual Rates“ versehen. Das bedeutet, dass man mit Hilfe eines Schalters die Maximalausschläge, die die Taranis sendet, z.B. auf 50% heruntersetzt und somit ein weniger empfindliches Reagieren des Miniquads auf Steuereingaben erhält. Zusätzlich kann man „Expo“ einstellen. Expo bedeutet, dass ein bestimmter Steuerknüppel in der Nähe seiner Mitte sehr unempfindlich reagiert, aber wenn man ihn in die Nähe seiner Maximalausschläge bringt, auf einmal sehr viel Steuerwirkung bekommt.
Dual Rates und Expo machen in diesem Fall nur für die Nicken (Pitch/Elevator/Höhenruder) und Rollen (Roll/Aileron/Querruder) Sinn. Ich fliege gerne mit 30%–35% Expo. Diese Funktionen habe ich auf Schalter SD gelegt.
5: Inputs mit Dual Rates
6/12: Mixer
Hier teilt man der Taranis mit, welche der oben definierten Inputs (Knüppel) und anderen Steuerelemente (Schalter etc.) auf welchem Kanal gesendet werden sollen. Am Anfang jeder Mixer-Zeile steht der Kanal, an den diese Zeile sendet. Beim Wählen der Quellen für die Zeile muss man darauf achten, dass es für die Knüppel jeweils einen Eintrag gibt, der z.B. „Ail“ (Aileron, Querruder) heißt, und einen, der „I-Ail“ heißt. Der Eintrag mit dem I steht dabei für das, was man vorher im Inputs-Screen definiert hat. Das heißt, dass etwa eingerichtete Dual Rates mit einbezogen werden. Verwendet man den Eintrag ohne das „I“, bekommt man den puren Knüppelausschlag ohne Dual Rates oder Expo. Es ist also wichtig, hier den Eintrag MIT „I“ zu benutzen!
Das Naze32 Board erwartet eine bestimmte Reihenfolge der Funktionen in den Kanälen, die es vom EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... bekommt, deshalb sollte man hier darauf achten, die für den jeweiligen Flight ControllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... richtige Reihenfolge der Kanzel zu definieren. Wie unten zu sehen ist, sind die Kanäle folgendermaßen belegt:
1: Rollen; 2: Nicken; 3: Gas; 4: Gieren. Die Kanäle 5–7 habe ich mit Schaltern auf der Taranis belegt, die ich zum Umschalten zwischen verschiedenen Funktionen oder Modes benutze.
6: Mixer mit Inputs und Schaltern
7/12: Servos
Wer will, kann hier den Kanälen Namen geben. Außerdem stellt man hier die Grenzen ein, innerhalb derer sich die Werte bewegen, die die Fernsteuerung in den einzelnen Kanälen sendet. Im Zusammenspiel mit dem Flight ControllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... und der CleanFlight oder Base Flight Software müssen hier die Endpunkte (also die Maximalausschläge) der Kanäle richtig getrimmt werden. Das Naze32 erwartet z.B. in jedem Kanal als niedrigsten Wert 1000us, als Mitte genau 1500us und als höchsten Wert 2000us. (Hierbei handelt es sich um die Länge in Mikrosekunden der Pulse, die in dem Kanal gesendet werden.)
7: Servos getrimmt für Naze
8/12: Curves
Für einen Miniqual mit Flight ControllerFlight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn... ist diese Seite irrelevant.
9/12: Global Variables
Auch diese Seite ist für unseren Zweck nicht notwendig.
10/12: Logical Switches
Logische Schalter können dazu benutzt werden, um spezielle Funktionen auszulösen, die man sich wünscht. Es ist keinesfalls nötig, sie bei einem Miniqual einzusetzen. Aber ich fand es cool, ein bisschen in die Programmierung der Taranis einzusteigen und habe mir hier ein paar Spielereien gebastelt.
Unverzichtbar sind die Funktionen hier allerdings zum Einrichten des Alarms für einen (fast) leeren Flugakku. Die Vorgehensweise ist die, dass man einen Logical Switch auf ON (oder JA, EINS) setzt, wenn der Wert für Cells (das ist der Telemetriewert für die Akkuspannung, den das NazeBoard mittels D4R-II EmpfängerReceiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi... an die Taranis sendet) eine bestimmte Voltzahl unterschreitet. Ich habe zwei verschiedene Switches definiert – einen für „fast leer“ und einen für „jetzt aber landen!“.
(Außerdem habe ich eine Ansage gebastelt, die mir mitteilt, wenn ich den Quad scharfschalte.)
10: Logische Schalter
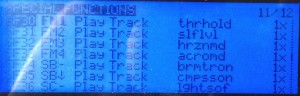
11/12: Special Functions
Für alle meine Modelle ist die erste Special Function IMMER der Throttle Cut! Wenn ich Schalter SF umlege, springt der Wert für den Gashebel augenblicklich auf AUS (hier -100). Ab Funktion Nummer 30 habe ich die Einträge für die verschiedenen Sprachmitteilungen programmiert:
11: Special Functions: Throttle Cut
11: Special Functions: Sprache
12/12: Telemetry
Um zu diesem Screen zu kommen muss man übrigens nicht zwölfmal den „Page“-Knopf drücken – man kann ihn auch einmal lange drücken! Auf dem ersten Foto kann man sehen, dass für dieses Modell bei „User Data“ eingetragen ist „Blades: 12“. Mit dieser Einstellung ist es möglich, vom Naze32 zu empfangen, wievial Gas man gerade gibt, denn es sendet diesen Wert unter dem Namen „RPM“. „Voltage Source: Cells“ bedeutet, dass die Akkuspannung, die im Homescreen der Taranis angezeigt wird, ihren Wert von der vom Naze ermittelten Akkuspannung erhält. Weiter unten, bei „Screen 1“ sagt „Nums“, dass man gerne Zahlen anzeigen möchte. Darunter legt man fest, welche (die Werte, die das Naze sendet sind die auf Foto unten).
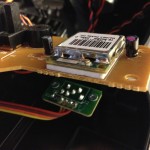
Um mit der Taranis auch Bind’n’Fly-Modelle von HorizonHobby fliegen zu können (z.B. die ganzen coolen Blade-Helikopter), kann man entweder das Orange Modul von Hobbyking kaufen und damit leben, dass man nur DSM2 benutzen kann. ODER man bastelt sich aus einer alten DX4e oder DX5 und einem leeren Modulgehäuse ein echtes DSMX-Modul selbst! Die Firmware der Taranis hat einen eigenen Menüpunkt dafür. Und das bedeutet, dass das selbstgebaute Modul nicht über den Umweg von CPPMCombined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! angesteuert wird, sondern die Taranis kommuniziert tatsächlich direkt in der Spektrum-Sprache mit dem HF-Chip. Das bedeutet geringere Latenz.
Bei diesem Projekt habe ich mich weitestgehend an der [fancy_link link=“http://johnprikkel.blogspot.de/2014/07/jr-dsmx.html“ variation=“teal“ target=“blank“]Anleitung von John Prikkel[/fancy_link] orientiert. Das schwierigste war es, das Original-HF-Modul aus der alten DX4e rauszulöten, ohne etwas zu zerstören. Nach geglückter Operation ist die DX4 übrigens weiter uneingeschränkt als Schüler-Funke nutzbar, denn der PPM-Output auf der Rückseite ich nicht beeinträchtigt.
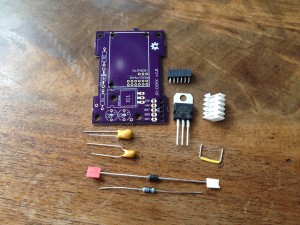
Diese Teile werden benötigt:
IC1 LD1117V33
R1 4.7K (5%, 1/2 Watt)
R2 Drahtbrücke
D1 1N4001
C1 1uF
C2 10uF
JP1 Molex 538-22-14-2054
JP2 Harwin M22-7140642
Gehäuse: [fancy_link link=“http://www.horizonhobby.com/products/integrated-case-for-jr-compatible-air-module-SPM6817″ variation=“teal“ target=“blank“]DM9-Leergehäuase von Spektrum[/fancy_link]
Dieser Einkaufskorb bei Mouser Elektronik Versand enthält die benötigten Teile:
[fancy_link link=“http://www.mouser.com/ProjectManager/ProjectDetail.aspx?AccessID=027ba40aa6″ variation=“teal“ target=“blank“]Mouser Projekt[/fancy_link]
Hier sind ein paar Fotos:
Dies sind die Teile, die benötigt werden:
In diesem Video kann man sehr gut sehen, wie gering die Latenz mit diesem Modul ist. In der Taranis eingesetzt zum Steuern eines Blade mCPX Helis ist in der echten Welt keinerlei Verzögerung zu sehen. Lediglich die Zeitlupe zeigt einen winzigen Unterschied: