Copter.Cologne lässt Euch ab sofort Eure eigenen Fotos und Videos hochladen! Wer möchte, kann uns seine selbstgemachten Fotos und Videos geben, die wir dann auf dieser Seite und auf YouTube veröffentlichen können. Um das Hochladen zu ermöglichen, haben wir zwei Dienste eingerichtet, über die Ihr uns Eure Dateien schicken könnt:
Natürlich könnt Ihr Eure Filme und Fotos auch auf Euren eigenen YouTube-Account hochladen und dann einen Link bei uns ins Forum stellen!
[fancy_link link=“http://copter.cologne/forum/alles/user-videos/“]http://copter.cologne/forum/alles/user-videos/[/fancy_link]
Angucken:
Wir freuen uns schon auf Euren Input! Anschauen könnt Ihr all die Videos auf unserer neuen [fancy_link link=“http://copter.cologne/videos/“]Video-Seite[/fancy_link]
Am 13.3.2016 war Flugtag auf unserer Grünen Wiese (Siehe auch [fancy_link link=“http://copter.cologne/fliegen/“]unsere Flugseite[/fancy_link]). Unser User zerron112 hat das ganze mit seinem Copter gefilmt – viel Spaß beim Anschauen und hoffentlich bis bald auf unserem nächsten Flugtag oder [fancy_link link=“http://copter.cologne/stammtisch/“]Stammtisch[/fancy_link]!
Mein neuer Plan ist es, einen Hexacopter zu bauen. Das Projekt steht noch ganz am Anfang.
Er soll am Ende vor allem als Plattform für kleinere Kameras dienen. Deshalb werde ich versuchen, einen Antrieb zu bauen, der diese Nutzlast heben kann. Außerdem soll der Hexa ein Kamera-Gimbal bekommen. Deshalb wäre es praktisch, wenn der Flight Controller bereits Funktionen dafür hat. Ein leichter Rahmen ist angesagt.
Um die Übersicht zu behalten, gliedere ich dieses Projekt in mehrere Teile:
Dies ist Teil 1.
Teil 2 beschreibt nun den Bau des eigentlichen Hexacopters, ohne aber ein Gimbal und eine Kamera zu montieren.
Teil 3 wird sich mit dem Pixhawk beschäftigen. Was wird wo angeschlossen? Wie wird er programmiert? Welche (Bodenstations-)Software gibt es? 433MHz-MAVLink-Funk, Flight Modes, die Fernsteuerung etc. werden eingestellt.
In Teil 4 soll bewiesen werden, dass der Hex tatsächlich fliegt. Der Autopilot soll besser kennengelernt werden. Es soll getestet werden, wieviel Nutzlast getragen werden kann und ob die Berechnungen con Ecalc stimmten.
In den folgenden Teilen soll dann beschrieben werden, wie und welches Gibal montiert wird, wie die Kamera befestigt wird etc.
Der Rahmen ist das einzige Teil, das ich bereits habe. Es ist der Hobbyking Talon 625 aus Carbon und Alu.
Talon 650 Hex
Bausatz
Nachdem ich einen Tag damit verbracht habe, verschiedene Antriebs-Komponenten in Erwägung zu ziehen und vor allem die Kombinationen mit dem Online-Rechner für Flugmodelle ecalc.ch durchzurechnen, habe ich auch bereits einige Teile bestellt:
Nach den bekannten Ohm’schen Gesetzen steigt der Verlust durch Widerstand in elektrischen Leitungen mit dem Strom quadratisch an, mit der Spannung steigt er nur linear an. Deshalb gibt es vom Stromkraftwerk über Land Hochspannungsleitungen, der Strom wird erst kurz vor den Haushalten auf 230V herunter transformiert. So kann man dieselbe Leistung verschicken, ohne viel Verlust in Wärme zu stecken. (Siehe Wikipedia-Artikel über Hochspannungsleitungen)
Deshalb habe ich entschieden, dass der Antrieb mit 6S erfolgen soll.
Außerdem benutze ich die größten Propeller, die auf diese Plattform passen, 12″, mit einer Steigung von 5.5″.
All das führt dazu, dass die ESCs zwar tauglich für 6S sein müssen, aber nur 20A aushalten müssen. Wie man sieht, orientieren sich meine Zahlen und Komponenten stark an dem 6S Upgrade Kit für Hexakopter, das es von DJI zu kaufen gibt. Damit dürfte es ziemlich effizient sein, denn dafür ist DJI unter anderem ja bekannt.
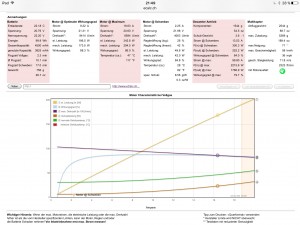
Berechnungen
Ausgehend von den Daten des Antriebssets von DJI habe ich die obigen Komponenten in den Rechner bei Ecalc eingegeben. Hohe Spannung heißt niedrige kV-Zahl für die Motoren. Die größten Propeller, die auf den 625er Rahmen passen, sind 12″ groß. Bei kräftigen Motoren darf man ruhig mal eine hohe Steigung von 5,5″ bei den Props wählen. Die Werte, die hier errechnet wurden, stimmen mich optimistisch:
Ein Motor beim Schweben: 2,25A, 49,6W
Gesamter Antrieb beim Schweben: 13,53A, 300W
Strom maximal: 99,8A
Maximale Zuladung: 5,3kg! (Das wird später das Gimbal, die Kamera und das Ladegestell!)
Am Freitag (26.2.2016) haben sich einige wagemutige Pioniere der ferngesteuerten Flugkunst im Kölner Süden auf der Grünen Wiese getroffen und diverse Geräte in die Luft befördert. Nichts nahm dauerhaft Schaden. Das erste Mal den EasyStar mittels FPV zu fliegen war ein großes Abenteuer. Natürlich haben wir einen Spotter gehabt, der mit Schüler-Lehrer-Schaltung jederzeit übernehmen konnte. Wir wollen ja auf legalem Territorium Spaß haben!
Das Video ist die Aufzeichnung des Video-Downlinks. Die 600TVL-Board-Kamera wurde also direkt mit Hilfe der Fatshark Dominator HD v2 auf eine Micro SD-Karte aufgenommen.
Heute habe ich meine FrSky Taranis X9D, die noch nicht die „Plus“-Variante ist, mit einem kleinen Modul für den Vibrationsalarm nachgerüstet. Das war zwar ein bisschen fummelig, aber mit ein bisschen Geschick und dieser Anleitung kriegt Ihr das auch hin! Es gibt dazu auch ein offizielles [fancy_link link=“http://www.frsky-rc.com/download/view.php?sort=&down=149&file=Taranis%20X9D%20Vibration%20Mount%20Guide“ target=“blank“]PDF von FrSky[/fancy_link] auf Englisch, das Ihr Euch angucken könnt oder [download_link link=“http://copter.cologne/wp-content/uploads/2016/03/Taranis-X9D-Vibration-component.pdf“]hier runterladen[/download_link] könnt.
Voraussetzungen
Diese Anleitung bezieht sich nur auf die Taranis X9D (ohne Plus) Version B! Ob Eure Taranis solch eine ist, könnt Ihr auf ihrer Rückseite erkennen:
Taranis Version B
Basteltisch
Ansonsten sind drei kleine Drähte nötig, Heißkleber, ein Lötkolben, Lötzinn und ein paar Werkzeuge wie kleine Zangen, Schraubenzieher etc.
Los geht’s!
Das sog. Haptic-Modul besteht aus einem winzigen Motor auf einer Platine. Es braucht lediglich Strom (also + und –) und einen Draht für das Signal, wann er losgehen soll.
Das Haptic Modul zum Nachrüsten
Drähte dran
Als erstes lötet man genau diese Drähte an das kleine Bauteil. Am besten nimmt man verschiedene Farben. Und dann muss man natürlich die Fernsteuerung aufschrauben. Vor dem Öffnen des Senders sollte man immer die Batterie entnehmen. Das Gehäuse lässt sich leicht aufklappen und zwei der vielen Schalter fallen einem entgegen.
Batterie raus!
Schalter lösen!
Taranis aufklappen!
Die beiden Schalter, die immer rausfallen, habe ich mit Doppelklebeband festgemacht, damit sie nicht so nerven. Und schon sieht man recht gut, wo unser kleines Vibrations-Modul eingebaut werden soll:
Lockere Schalter…
…werden festgeklebt.
Rechts neben dem Sende-Board kommt der Motor hin.
Rechts neben der Platine des 2,4GHz-Senders sind zwei Schrauben, und genau dahin kommt unser Haptik-Modul. Dafür muss man diese Schrauben entfernen, ein bisschen Heißkleber auf die Platine geben und schnell das kleine Modul mit den Schrauben dort befestigen. Aufpassen, dass man nicht die dünnen Kabel des Motors selbst festschraubt!
Schrauben rausdrehen!
Hier kommt der Heißkleber drauf!
Dann das Modul draufdrücken…
sodass es auf die Löcher passt, …
…und dann wieder festschrauben!
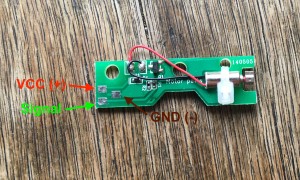
Als nächstes werden die Kabel festgelötet. Die drei Stellen, an denen die Litzen später sein sollen, sind etwas haarig!
Die drei Lötpunkte
Um das Kabel für das Signal festzulegen, muss man eine der vielen Leiter aus dem Stecker ziehen. Das fällt leichter, wenn man ihn dafür kurz rauszieht. Und dann vorsichtig alles verlöten! VCC + kommt an die rechte Seite des winzigen Widerstands R10, GND– kommt an die rechte Seite von D5. Für das Signal-Kabel nicht vergessen, vorher ein winziges Stück Schrumpfschlaue über den Draht zu ziehen!
Stecker rausziehen!
Leiter rausziehen!
VCC+ sitzt!
GND– sitzt!
Signal-Kabel verbunden!
Lötstelle verschrumpfen!
Das fertige Werk sollte dann ungefähr so aussehen:
Fertig!
Nun kann man die Taranis vorsichtig wieder zusammensetzen und zuschrauben.
Software einstellen
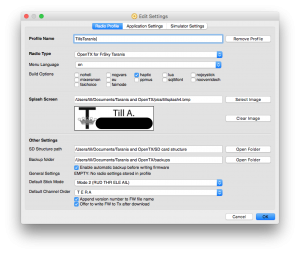
Damit der Vibrationsalarm auf wirklich funktioniert, muss man jetzt nur noch eine bestimmte Variante der Firmware auf der Taranis installieren, damit [fancy_link link=“http://www.open-tx.org/downloads“ target=“blank“]OpenTX[/fancy_link] auch weiß, dass man das Modul eingebaut hat. Das ist aber mit Hilfe der OpenTX-Software [fancy_link link=“http://www.open-tx.org/downloads“ target=“blank“]companion[/fancy_link] ganz einfach! In dem Programm müsst Ihr im Menü Einstellungen (das Zahnrad-Symbol) das kleine Häkchen setzen bei „haptic“, dann OK klicken und dann die Firmware neu aufspielen.
„haptic“ ankreuzen!
Das geht, indem Ihr an der Taranis den linken und rechten waagerechten Trimmschalter jeweils in Richtung An-/Ausschalter drückt und dann mit gedrückten Schaltern die Taranis einschaltet. So bootet sie in das Service-Menü. Jetzt könnt Ihr einfach einen USB-Stecker in Euren Rechner Stecken und auf der Rückseite mit dem USB-Port der Taranis verbinden. Sobald sich zwei Massenspeicher am Rechner zeigen, könnt Ihr companion verwenden, um die neue Firmware auf den Sender zu flashen. Dann werft Ihr die beiden Massenspeicher sicher aus, zieht das USB-Kabel ab und drückt auf der Taranis im Menü „Exit“. So startet sie und Ihr könnt Eure Haptik mittels einem langen Druck auf die Menu-Taste konfigurieren.
Es war wieder mal ein lustiger Abend! Diesmal waren besonders viele winzige Copter anwesend und ein [fancy_link link=“http://copter.cologne/dizzibird-basteltag/“]Dizzy-Bird[/fancy_link].
Am 13.2.2016 trafen sich Einige vom Copter-Cologne-Stasmmtisch zu einem Bastel-Nachmittag. Jeder hatte verschiedene Sachen und Projekte dabei, die er reparieren, löten, bauen, kleben wollte. So fanden sich viele Modelle, Werkzeuge und Einzelteile auf Tischen und auf dem Boden. Außer produktiv zu sein, haben wir natürlich auch viel gequatscht.
Mein neustes liebstes Spielzeug momentan ist der FPV Nano QX von Blade. Kürzlich habe ich die BNF-Variante gekauft und benutze sie zusammen mit den Fatshark Dominator HD v2 Goggles und meiner Taranis. Absolute Empfehlung zum Erlernen des FPV-Fliegens. Man kann in Ruhe zu Hause üben, ist unabhängig von Wind und Wetter und kann auf einen zweiten Mann, den Spotter, verzichten.
Natürlich benutze ich zum Fliegen mein selbstgebautes DSMX-Modul ([fancy_link link=“http://copter.cologne/dsmx-modul-fuer-taranis-basteln/“]Bauanleitung[/fancy_link]) in der FrSky Taranis, welches ja bekanntermaßen [fancy_link link=“http://copter.cologne/dsmx-latenz-test/“]sehr gute Dienste[/fancy_link] leistet.
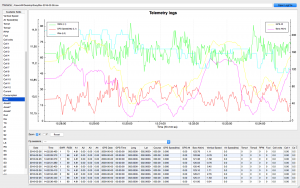
Heute habe ich einen kurzen Test gemacht, der die Latenz meines selbstgebauten DSMX-Moduls ([fancy_link link=“http://copter.cologne/dsmx-modul-fuer-taranis-basteln/“]meine Bauanleitung[/fancy_link]) für die Taranis darstellen sollte. Ich war sehr überrascht, wie gering die Verzögerung ist! Mit bloßen Augen ist kaum wahrzunehmen, dass zwischen dem Umlegen eines Schalters an der Fernsteuerung und der Reaktion des Modells darauf überhaupt Zeit vergeht.
In diesem Video sieht man sehr gut, welch geringe Latenz das selbstgebaute DSMX-Modul für die Taranis zusammen mit den Helis von Spektrum Blade hat. In der echten Welt ist die Verzögerung nicht zu erkennen. Lediglich in der Zeitlupe sieht man, dass es eine winzige Verzögerung zwischen dem Umlegen des Schalters und der Reaktion des Helis darauf gibt.