Um mit der Taranis auch Bind’n’Fly-Modelle von HorizonHobby fliegen zu können (z.B. die ganzen coolen Blade-Helikopter), kann man entweder das Orange Modul von Hobbyking kaufen und damit leben, dass man nur DSM2 benutzen kann. ODER man bastelt sich aus einer alten DX4e oder DX5 und einem leeren Modulgehäuse ein echtes DSMX-Modul selbst! Die Firmware der Taranis hat einen eigenen Menüpunkt dafür. Und das bedeutet, dass das selbstgebaute Modul nicht über den Umweg von CPPM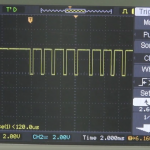 Combined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! angesteuert wird, sondern die Taranis kommuniziert tatsächlich direkt in der Spektrum-Sprache mit dem HF-Chip. Das bedeutet geringere Latenz.
Combined Pulse Position Modulation. Eine Methode, um die PPM Befehle vom Empfänger für mehrere Servos nacheinander durch ein einziges Kabel zu senden. Alternative digitale Methoden sind z.B. S.BUS Nicht zu verwechseln mit CCPM! angesteuert wird, sondern die Taranis kommuniziert tatsächlich direkt in der Spektrum-Sprache mit dem HF-Chip. Das bedeutet geringere Latenz.
Bei diesem Projekt habe ich mich weitestgehend an der [fancy_link link=“http://johnprikkel.blogspot.de/2014/07/jr-dsmx.html“ variation=“teal“ target=“blank“]Anleitung von John Prikkel[/fancy_link] orientiert. Das schwierigste war es, das Original-HF-Modul aus der alten DX4e rauszulöten, ohne etwas zu zerstören. Nach geglückter Operation ist die DX4 übrigens weiter uneingeschränkt als Schüler-Funke nutzbar, denn der PPM-Output auf der Rückseite ich nicht beeinträchtigt.
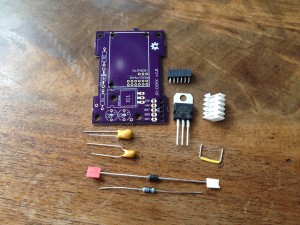
Diese Teile werden benötigt:
- IC1 LD1117V33
- R1 4.7K (5%, 1/2 Watt)
- R2 Drahtbrücke
- D1 1N4001
- C1 1uF
- C2 10uF
- JP1 Molex 538-22-14-2054
- JP2 Harwin M22-7140642
- Gehäuse: [fancy_link link=“http://www.horizonhobby.com/products/integrated-case-for-jr-compatible-air-module-SPM6817″ variation=“teal“ target=“blank“]DM9-Leergehäuase von Spektrum[/fancy_link]
- Platine: [fancy_link link=“https://oshpark.com/shared_projects/mQXHRTOA“ variation=“teal“ target=“blank“]von OshPark[/fancy_link]
Dieser Einkaufskorb bei Mouser Elektronik Versand enthält die benötigten Teile:
[fancy_link link=“http://www.mouser.com/ProjectManager/ProjectDetail.aspx?AccessID=027ba40aa6″ variation=“teal“ target=“blank“]Mouser Projekt[/fancy_link]
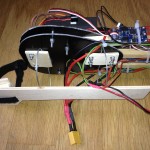
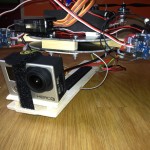
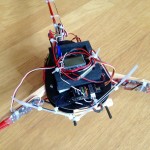
Hier sind ein paar Fotos:







Dies sind die Teile, die benötigt werden:

In diesem Video kann man sehr gut sehen, wie gering die Latenz mit diesem Modul ist. In der Taranis eingesetzt zum Steuern eines Blade mCPX Helis ist in der echten Welt keinerlei Verzögerung zu sehen. Lediglich die Zeitlupe zeigt einen winzigen Unterschied: