Projekt Kamera-Hex, Teil 2: Der Bau
Mein Ziel ist es, einen kameratragenden Hexacopter zu bauen, der mit einem Stabilisierung-Gimbal und einem möglichst intelligenten Autopiloten ausgestattet ist. Als Rahmen dafür nehme ich den Talon Hex, weil er schon ewig bei mir rumliegt. Darauf aufbauend habe ich versucht, möglichst gut passende und effiziente Komponenten zusammenzukaufen. Für den Autopiloten fiel die Wahl auf den Pixhawk, weil er wahnsinnig viele Funktionen unterstützt, und weil Hardware sowie Software Open Source sind.
Um die Übersicht zu behalten, gliedere ich dieses Projekt in mehrere Teile:
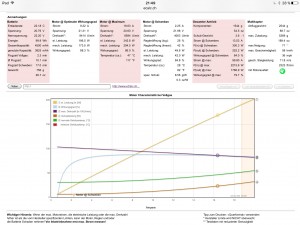
- Teil 1 war die Idee und das Vorhaben, sie umzusetzen. Außerdem habe ich in Teil 1 den Antrieb mittels Ecalc geplant, um die Komponenten bestellen zu können.
- Dieser Teil 2 beschreibt nun den Bau des eigentlichen Hexacopters, ohne aber ein Gimbal
 Eine Vorrichtung, um eine Kamera so an einem ferngesteuerten Flugmodell zu befestigen, dass die Kamera trotz der Bewegungen des Fluggeräts beim Flug ein absolut ruhiges Bild liefert. Dazu wird die Kamera in mindestens zwei Achsen, oft in drei Achsen... und eine Kamera zu montieren.
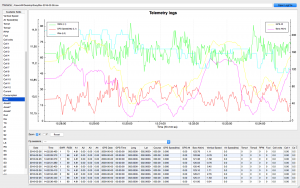
Eine Vorrichtung, um eine Kamera so an einem ferngesteuerten Flugmodell zu befestigen, dass die Kamera trotz der Bewegungen des Fluggeräts beim Flug ein absolut ruhiges Bild liefert. Dazu wird die Kamera in mindestens zwei Achsen, oft in drei Achsen... und eine Kamera zu montieren. - Teil 3 wird sich mit dem Pixhawk beschäftigen. Was wird wo angeschlossen? Wie wird er programmiert? Welche (Bodenstations-)Software gibt es? 433MHz-MAVLink-Funk, Flight Modes, die Fernsteuerung etc. werden eingestellt.
- In Teil 4 soll bewiesen werden, dass der Hex tatsächlich fliegt. Der Autopilot soll besser kennengelernt werden. Es soll getestet werden, wieviel Nutzlast getragen werden kann und ob die Berechnungen con Ecalc stimmten.
- In den folgenden Teilen soll dann beschrieben werden, wie und welches Gibal montiert wird, wie die Kamera befestigt wird etc.
Einkaufszettel
- Rahmen:
Talon 625
ca. €65,– - Propeller:
Hobbyking Karbon 12×5.5
ca. €9,– für 2 Stück - Motoren:
Quanum 3110 470kv
ca. €18,– pro Stück - ESCs
 Electronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ...:
Electronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ...:
Multistar 20A opto
ca. €6,50 pro Stück - FC
 Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn...:
Flight Controller. Eine Elektronische Einheit, meist eine Platine, die Funktionen zur Steuerung von Flugmodellen übernimmt. Die einfachsten Flight Controller sind dabe meist nur Stabilisatoren, die die Lage des Fluggeräts in der Luft erkennen könn...:
Hobbyking Pixhawk
ca. €110,–
oder Banggood Pixhawk
ca. €53,– - Flugakku:
Turnigy Heavy Duty 5000mAh 6S 60C LiPo
ca. €68,– - Power Distribution Board
 Power Distribution Board. Platine zur Verteilung des Stroms aus dem Antriebsakku. PDB aus einem Stück Platine selbst gebastelt Tarot PDB:
Power Distribution Board. Platine zur Verteilung des Stroms aus dem Antriebsakku. PDB aus einem Stück Platine selbst gebastelt Tarot PDB:
Tarot Hex PDB
ca. €2,70 - Empfänger
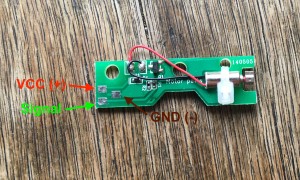
 Receiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi...:
Receiver. Empfänger. Das Bauteil, das die Steuerbefehle der Fernsteuerung empfängt und per PPM oder S.BUS Signal durch die Servokabel an die Servos und ESCs des Modells gibt. Bei FPV Anwendungen ist der Video-Empfänger gemeint, der am Boden das Bi...:
FrSky X4R SB (von Banggood)
oder FrSky X4R SB (von Hobbyking)
ca. €26,– - 433MHz Telemetrie MAVLink:
Hobbyking Funkmodule
ca. €33,–






Der Bau
Der Rahmen
Weil ich den Rahmen schon seit einiger Zeit nutzlos hier rumliegen hatte, habe ich ihn mir zuerst nochmal ganz genau angeguckt. Dabei habe ich bemerkt, dass ich ihn damals nur provisorisch zusammengebaut hatte. Alles war schief und krumm. Also habe ich ihn komplett auseinandergenommen. Beim neuerlichen Zusammenbau habe ich diesmal drauf geachtet, dass alle Teile ganz genau sitzen. Zum Beispiel sollten die Motor-Befestigungen genau waagerecht sein. Zwei gegenüberliegende Arme des Rahmens sollten genau eine gerade Linie miteinander bilden. Und bei allen wichtigen Schrauben habe ich diesmal den blauen, mittelfesten Schraubensicherungslack (lock tite) benutzt.









Nach Anleitung in der Dokumentation in der Ardupilot-Wiki habe ich auf jeden Arm eine Nummer geklebt und einen Pfeil mit der korrekten Drehrichtung des jeweiligen Motors. Das hilft ungemein beim Testen und man muss nicht immer wieder im Internet nachschauen, welche Reihenfolge die Motoren haben.



Kabel, Stromverteilung, ESCs
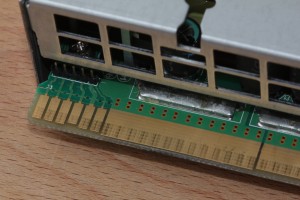
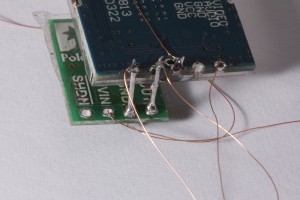
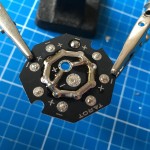
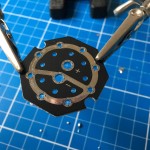
Von allen ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... habe ich die kleinen Bullet Connectors der Stromversorgung abgelötet um sie direkt auf das Tarot Stromverteiler-Board auflöten zu können. Diese recht kleine Platine habe ich mit reichlich Lötzinn verzinnt, damit höhere Ströme problemlos passieren können.
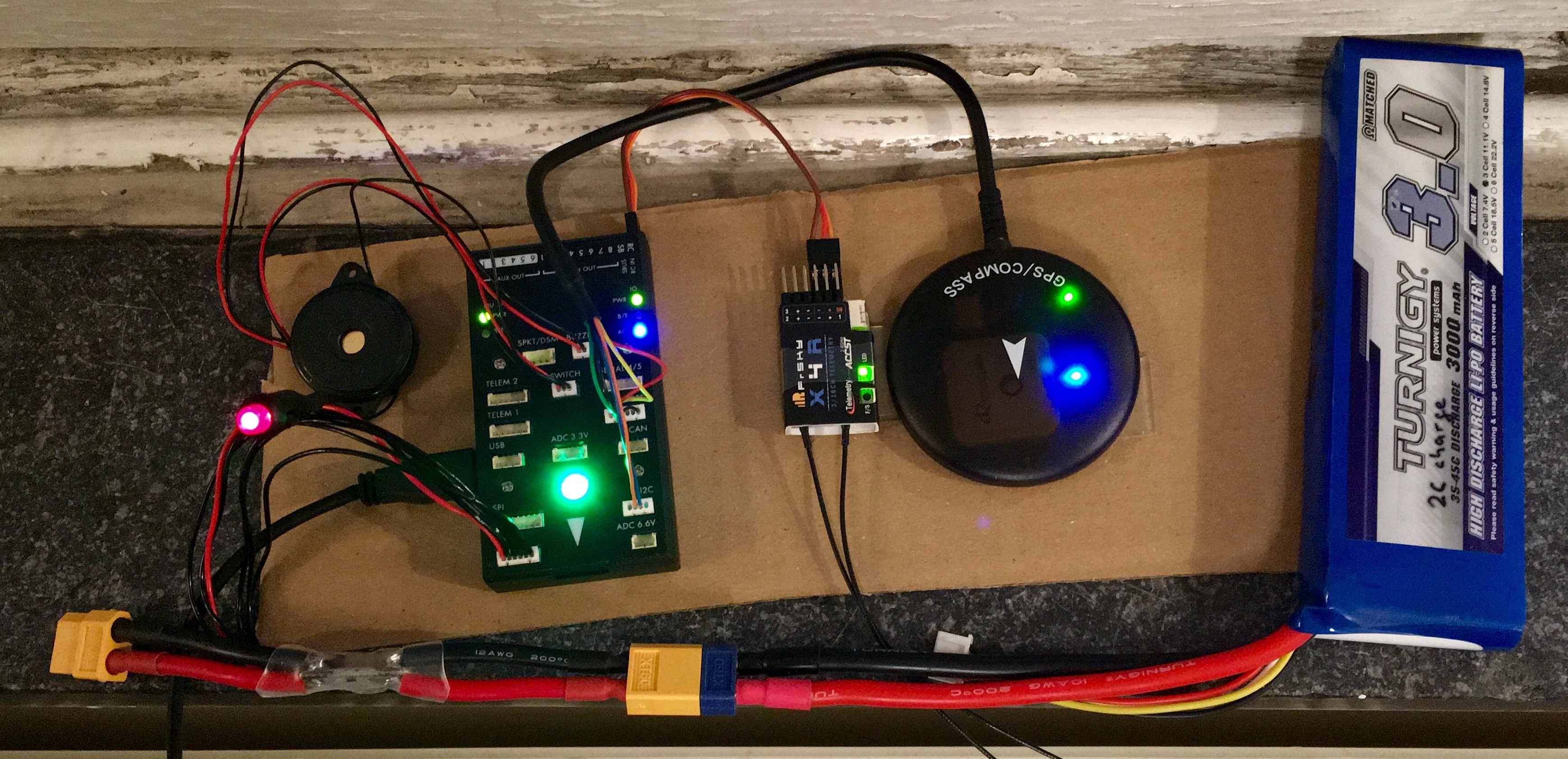
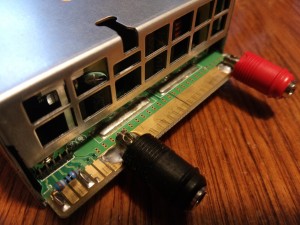
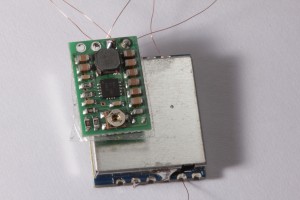
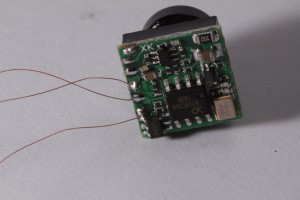
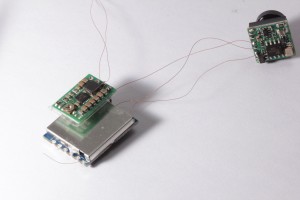
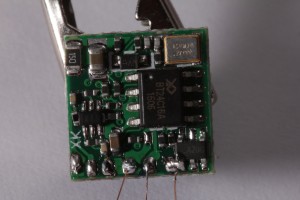
Als Zuleitung dient hier das „Power Module“ des Pixhawk. Während der Strom aus der Batterie durch das Power Module zu dem Verteiler fließt, misst das Modul die Spannung in V und den Strom in A. Außerdem ist in dem Modul ein kleiner BEC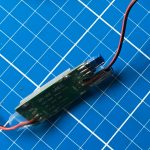 Battery Elimination Circuit. Elektronische Schaltung, die aus der relativ hohe Spannung von z.B. 3S Akkus eine Spannung macht, die Komponenten wie ein FC oder Servo benutzen können, meist 5V. eingebaut. Das Power Module wird mit einem sechsadrigen Kabel mit dem Pixhawk verbunden. Somit erhält der Pixhawk dadurch eine Stromversorgung und zusätzlich auch Daten über den Zustand der Batterie.
Battery Elimination Circuit. Elektronische Schaltung, die aus der relativ hohe Spannung von z.B. 3S Akkus eine Spannung macht, die Komponenten wie ein FC oder Servo benutzen können, meist 5V. eingebaut. Das Power Module wird mit einem sechsadrigen Kabel mit dem Pixhawk verbunden. Somit erhält der Pixhawk dadurch eine Stromversorgung und zusätzlich auch Daten über den Zustand der Batterie.
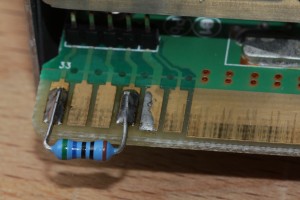
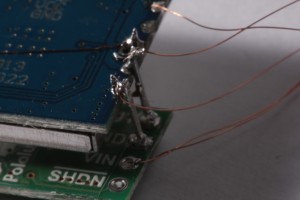
Zusätzlich habe ich einen 3A-BEC und einen extra XT60-Stecker an das Verteiler-Board gelötet:





Die Motoren
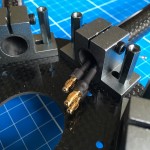
Ebenfalls mit blauem lock tite habe ich die Motoren befestigt, nachdem ich alle Litzen mit den Bullet Connectors versehen habe, die im Lieferumfang der Motoren enthalten waren. Durch die hohlen Arme des Rahmens ergibt sich eine sehr ordentliche Möglichkeit zur Verlegung der Kabel:








Verkabeln und zusammenbauen
Nachdem jetzt also alle Motoren sitzen und die Stromversorgung vorbereitet ist, kann alles zusammengesetzt und die Bodenplatte des Rahmens montiert werden. Es empfiehlt sich sehr, die Servostecker des einzelnen ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... mit Nummern zu beschriften, die zu denen passen, die man vorher auf die Arme des Rahmens geklebt hat. Sonst weiß man hinterher einfach nicht mehr, was was ist!



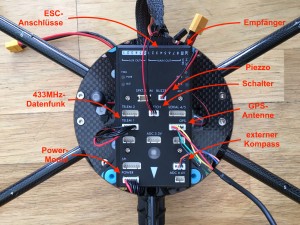
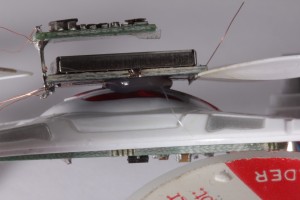
Obwohl die ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... eine längliche Bauform haben, passten sie nicht in die Arme hinein. Der Innendurchmesser der Arme beträgt 11mm, der Außendurchmesser 14mm. Deshalb habe ich sie um die Bodenplatte herum an den Armen angebracht. Das hässliche Hobbyking-Neongrün habe ich mit schwarzem Edding unschädlich gemacht. 😉 Nachdem die Bodenplatte angebracht war und alle Kabelage in dem engen Innenraum verstaut war, habe ich den Pixhawk oben drauf montiert. Die GPS-Antenne wird mit einem hilfreichen, klappbaren Sockel geliefert. Den FrSky X4R-Empfänger habe ich am hinteren Arm befestigt. Das 433MHz-Datenfunk-Modul für die Kommunikation des Pixhawk mit der Bodenstation (Telemetrie und MAVLink) habe ich am vorderen Arm angebracht. Ohne Akku und Propeller kommt mein Kamera-Hex (der ja noch ohne Kamera ist) auf 1,3kg.



Was fehlt jetzt noch?
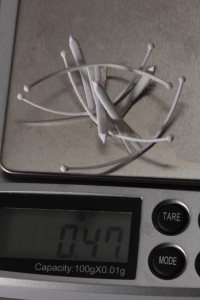
Propeller
Damit der Hex abheben kann, muss ich jetzt unbedingt sechs der zehn Propeller, die ich bestellt habe, auswuchten. Meine Propeller sind aus Carbon. Das heißt, sie sind sehr leicht, aber auch sehr steif, was wiederum heißt, dass sie Vibrationen viel stärker an den Rahmen weitergeben als z.B. Plastikpropeller. Deshalb ist es hier besonders wichtig, sie sorgfältig auszuwuchten.

Und muss geprüft werden, ob sich alle Motoren in die richtige Richtung drehen. Gegebenenfalls müssen die Anschlüsse zu den ESCsElectronic Speed Controller, Fahrtenregler Ein Bauteil, das aus den Befehlen des Empfängers einer Fernsteueranlage und dem Strom des Flugakkus direkt den Motor steuert. Die Anschlüsse sind also ein Servokabel (zum Empfänger), ein Stromkabel mit + ... verdolt werden, um das zu erreichen.


Pixhawk
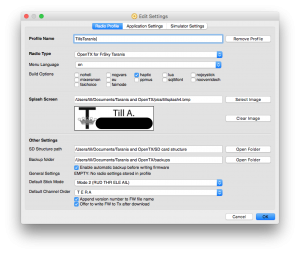
Außerdem muss natürlich der Pixhawk geflasht, programmiert und initialisiert werden. Den Pixhawk hat deshalb auch das nächste Kapitel zum Thema: Teil 3 dieser kleinen Serie widmet sich ihm und der Software, die es für ihn gibt.